




멋진 트래커네요 잘봤습니다
솔라 트래커 만들기
2015-01-12 10:04:46
개요
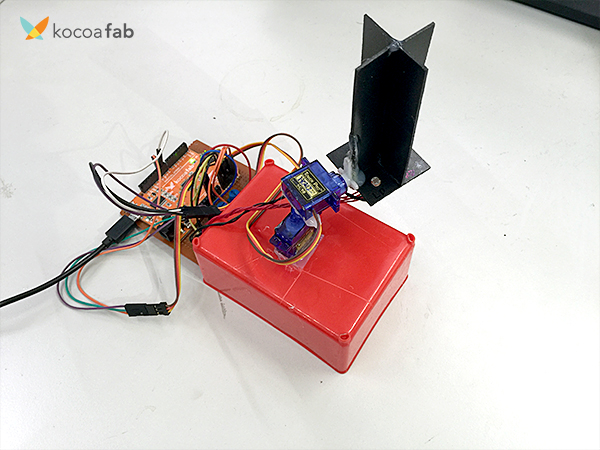
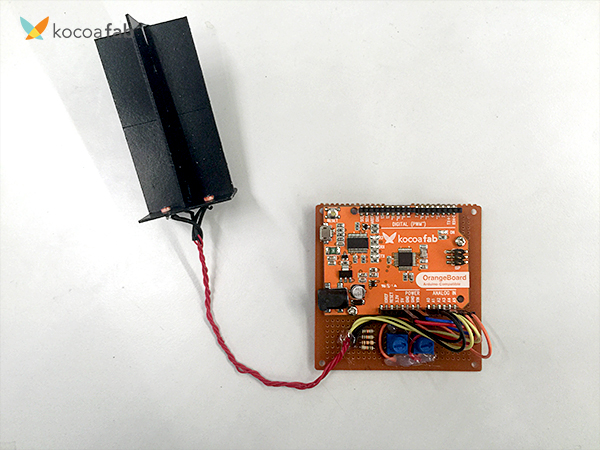
이번 프로젝트에서는 빛을 따라 움직이는 '솔라 트래커(Solar Tracker)'를 만들어 보겠습니다.
솔라 트래커는 말 그대로 빛(광원)의 움직임이나 빛의 양에 따라
그에 반응하여 가로축과 세로축을 움직이는 장치 입니다.
솔라 트래커는 말 그대로 빛(광원)의 움직임이나 빛의 양에 따라
그에 반응하여 가로축과 세로축을 움직이는 장치 입니다.
위 영상에서 볼 수 있듯이, 해바라기(?) 형상의 꽃이 빛을 따라 상, 하, 좌, 우로 움직이는 모습을 볼 수 있습니다.
여기에는 핵심 부품인 조도센서(Cds)가 쓰이는데요,
혹시 아직 조도센서에 대해 잘 모른다면,
아래의 링크를 통해 조도센서에 대해 학습해 보세요.
여기에는 핵심 부품인 조도센서(Cds)가 쓰이는데요,
혹시 아직 조도센서에 대해 잘 모른다면,
아래의 링크를 통해 조도센서에 대해 학습해 보세요.
원리는 생각보다 간단합니다.
4개 혹은 5개 이상의 조도센서를 각각의 포인트로 설정하여,
해당 포인트가 상대적으로 어둡거나 0값이 감지되면,
서보모터는 그 반대 방향으로 각도를 증가시키게 됩니다.
이를 통해 빛의 방향을 인식하고,
마치 따라다니듯 움직일 수 있는 것입니다.

물론 꼭 랜턴과 같은 작은 빛에만 반응하는 것은 아닙니다.
태양 빛에도 반응하며, 여기에 태양충전패널만 부착하면
DIY 발전기가 되지 않을까요 ?
태양 빛에도 반응하며, 여기에 태양충전패널만 부착하면
DIY 발전기가 되지 않을까요 ?
그럼 본격적으로 프로젝트를 시작해 보겠습니다.
관련 튜토리얼
이 프로젝트에서는 조도 센서와 서보 모터를 사용합니다.
코코아팹 컨텐츠를 참고해 미리 사용법을 익혀주세요!
* 제작을 진행하시기전 아래 링크를 통해 각 모듈의 라이브러리 다운로드와 함수 사용법을 인지하시는 것을 권장드립니다.
부품목록
| NO | 부품명 | 수량 | 상세설명 |
| 1 | 오렌지 보드 | 1 | 아두이노 호환보드 |
| 2 | 서보모터 | 2 | sg-90 |
| 3 | 조도센서 | 4 | cds |
| 4 | 가변저항 | 2 | 가변저항 |
| 5 | 10k 옴 저항 | 4 | 저항 |
| 6 | 전선 | 1 | 강선 1m |
| 7 | 점퍼케이블 | 11 | 푸시버튼 |
| 8 | 인두기 | 1 | 인두기 |
| 9 | 납 | 1 | 납 |
| 10 | 글루건 | 1 | 글루건 |
| 11 | 와이어 스트리퍼 | 1 | 와이어 스트리퍼 |
| 12 | 송곳 | 1 | 송곳 |
| 13 | 포맥스 | 1 | 포맥스 |
| 14 | 드레멜 | 1 | 전동공구 |
| 부품명 | 아두이노 | 서보모터 | 조도센서 | 가변저항 | 10k옴 저항 |
| 파트 | 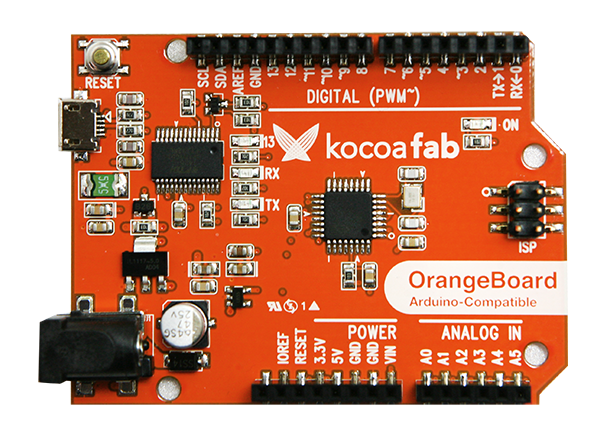 x1 x1 |
 x2 x2 |
 x4 x4 |
 x2 x2 |
 x4 x4 |
| 부품명 | 전선 | 점퍼케이블 | 인두기 | 납 | 글루건 |
| 파트 |  x1 x1 |
 x11 x11 |
 x1 x1 |
 x1 x1 |
 x1 x1 |
| 부품명 | 와이어 스트리퍼 | 송곳 | 포맥스 | 드레멜 | |
| 파트 |  x1 x1 |
 x1 x1 |
 x1 x1 |
 x1 x1 |
하드웨어 Making
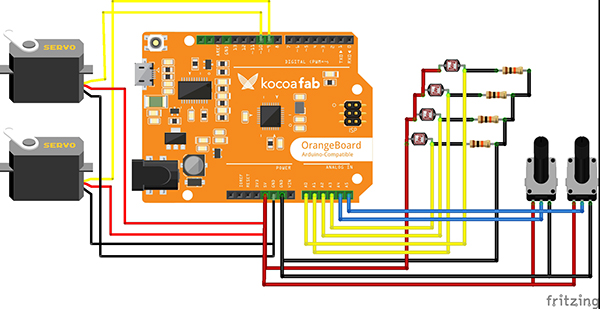
브레드 보드 레이아웃
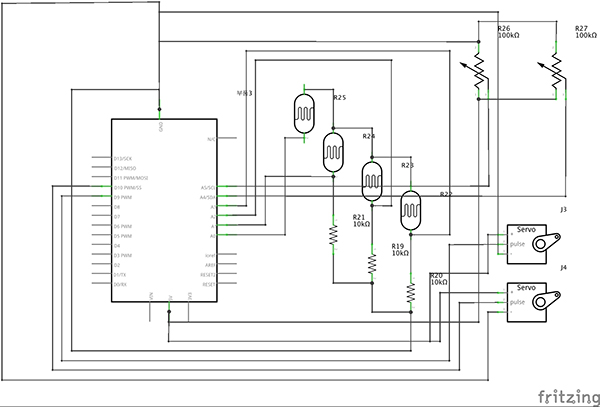
회로도(스키메틱)
제작 과정
솔라 트래커를 만드는 제작 과정에 대해 살펴볼까요? ;)
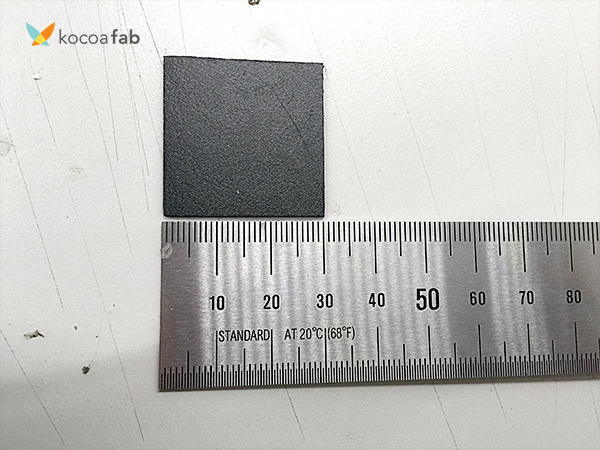
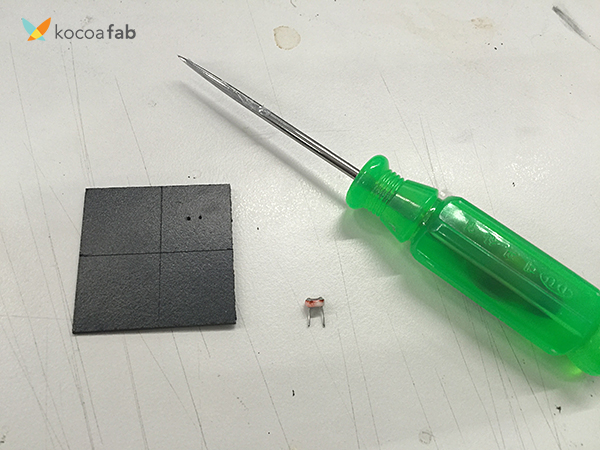
1. 3 cm x 3 cm 크기의 정 사각형 모양으로 포맥스를 재단합니다.
이는 조도센서 4개를 꽂아 넣는 받침으로 사용됩니다.
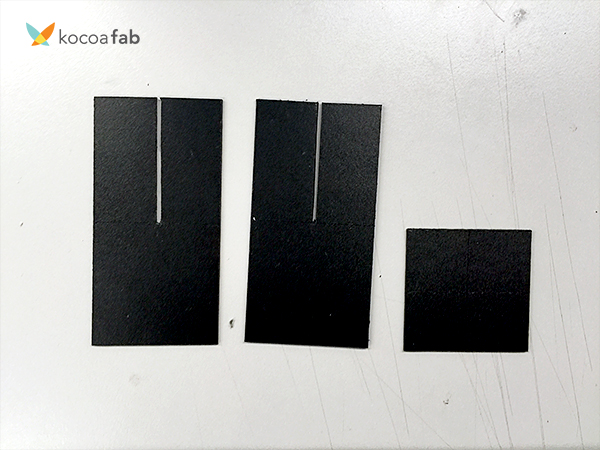
2. 가로 3cm 세로 6cm 크기로 포맥스를 재단합니다.
2개를 재단하고, 가운데 지점에 포맥스의 두께만큼 그리고 길이는 3cm로 홈을 파내어 줍니다.
포맥스는 미끄럽기 때문에 재단 작업시 항상 손을 다치지 않도록 주의해 주세요.
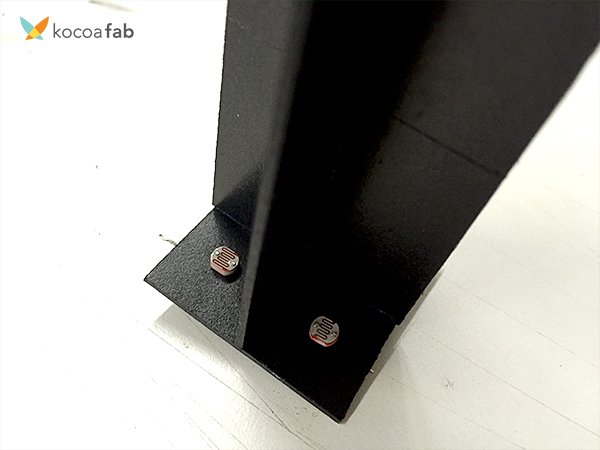
3. 이제 바닥판을 4등분 한뒤, 조도센서(cds)를 고정해 보겠습니다.
위 사진처럼 조도센서의 간격만큼 살짝 구멍을 뚤어주세요.
4. 조도센서를 넣어보겠습니다.
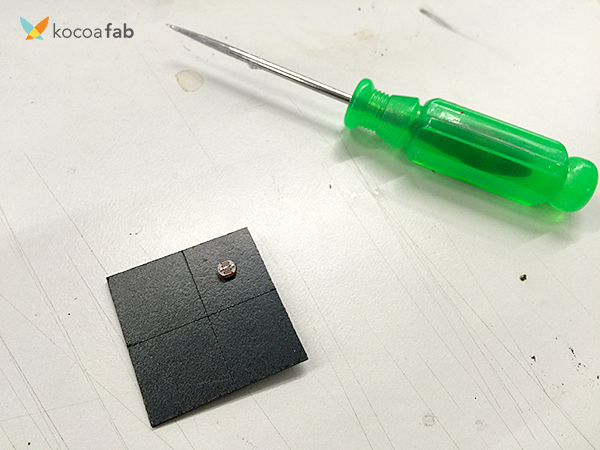
5. 나머지 부분도 동일하게 작업해 줍니다.

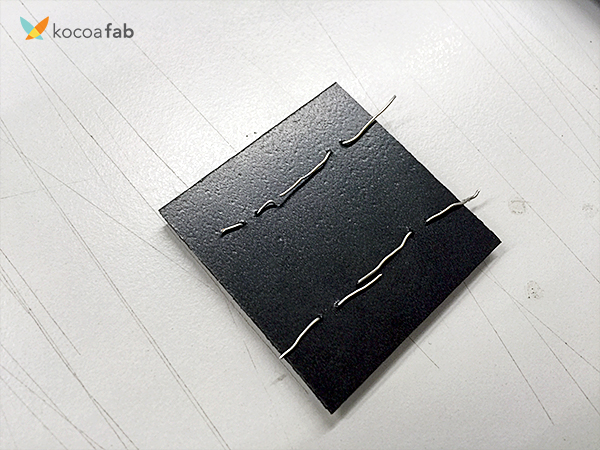
6. 뒷면의 모습입니다.
조도센서의 다리는 충분히 길기 때문에 별도의 전선을 쓰지않고,
서로 납땝을 하기 용이하도록 접어 펼쳐줍니다.
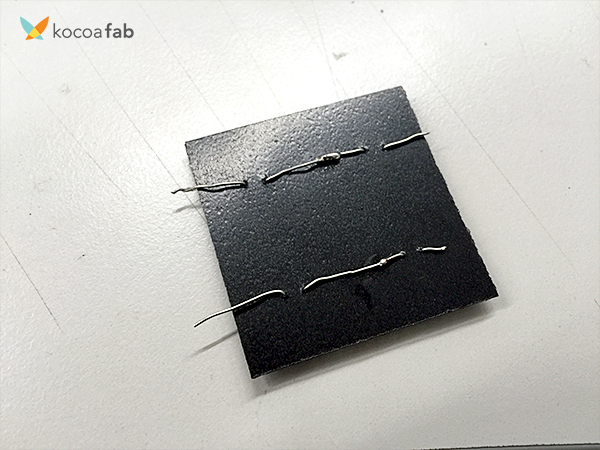
7. 서로 인접한 2개의 조도센서를 오른쪽, 왼쪽으로 구분하고
나중에 위, 아래를 구분하여 연결합니다.
지금은 서로 인접한 2개의 조도센서의 한쪽 다리를 서로 납땜하여 연결합니다.
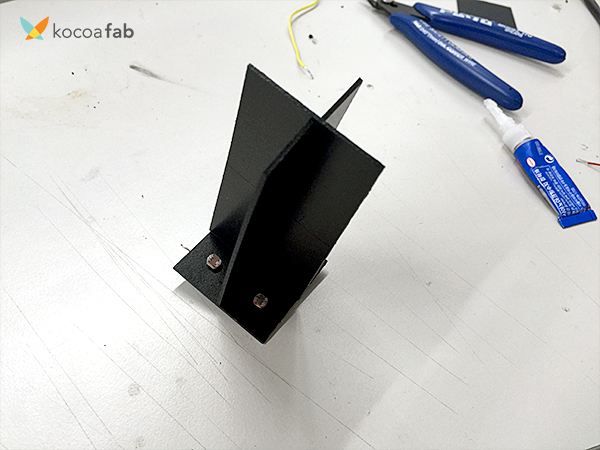
8. 미리 잘라둔 홈을 파낸 코맥스 파츠 두 개를 이용하여 십자 모양의 가림막을 만들어줍니다.
이 가림막을 역할을 4개의 조도센서로 유입되는 빛을 차단하여 '빛의 방향'을 측정하도록 합니다.
알고리즘상에서는 빛을 왼쪽에서 비춘다고 가정할 때,
'오른쪽'에 있는 조도센서에는 가림막에 의해 빛이 차단되어
'왼쪽'에서 빛이 유입된다는 것을 알려주는 원리입니다.
9.사진에서 처럼 왼쪽에서 빛이 올때 오른쪽에 있는 조도센서는 그림자가 생기게 됩니다.
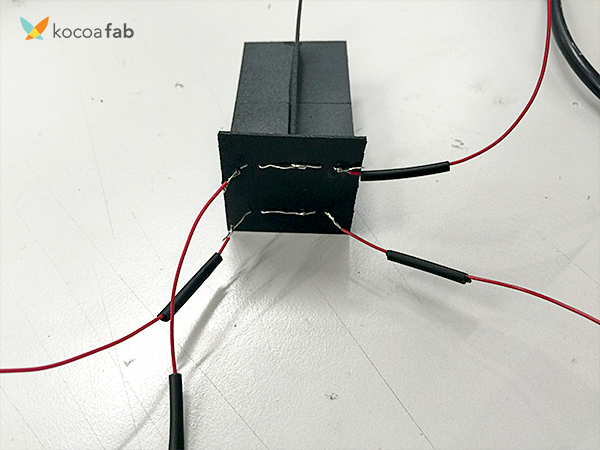
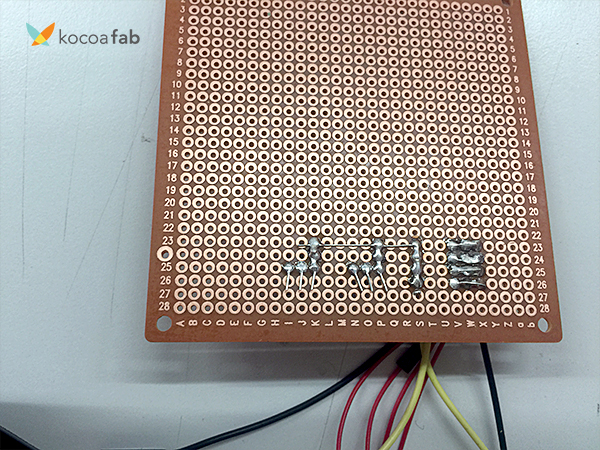
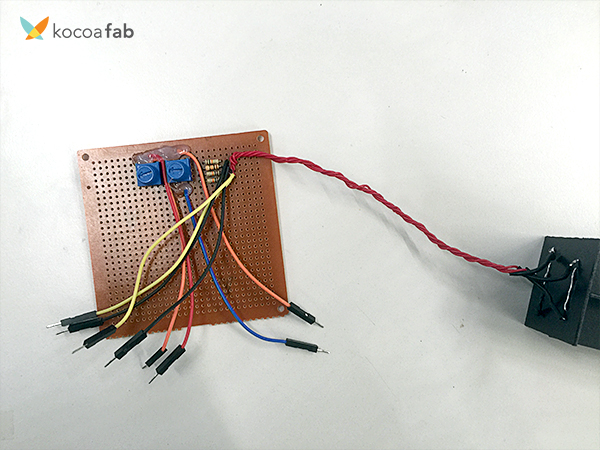
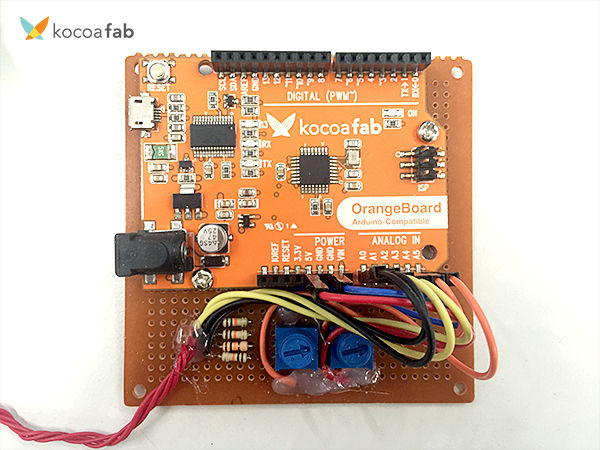
10. 이제 본격적인 회로 구성을 해보겠습니다.
먼저 연결한 두개씩 연결된 부분은 전선을 납땜하여 5V(+)에 연결해 줍니다.
그리고 사진에 보이는 빨간색 전선처럼 각각의 조도센서에 한쪽 끝에 전선을 납땜하여 줍니다.
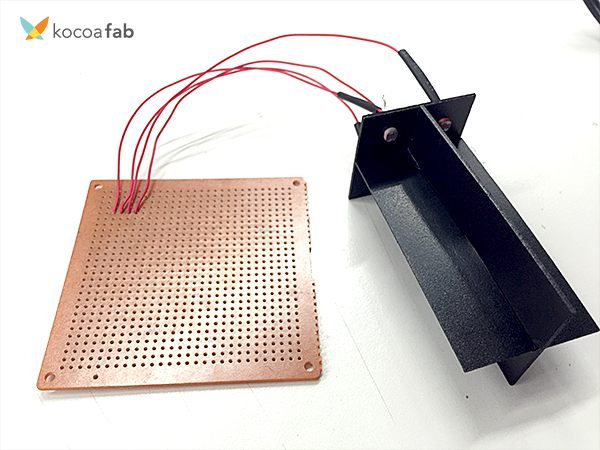
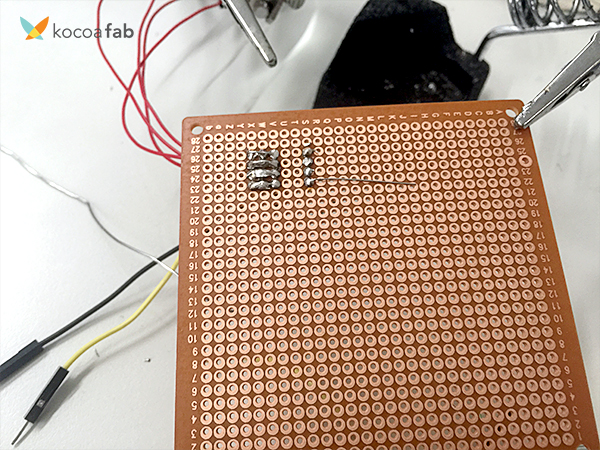
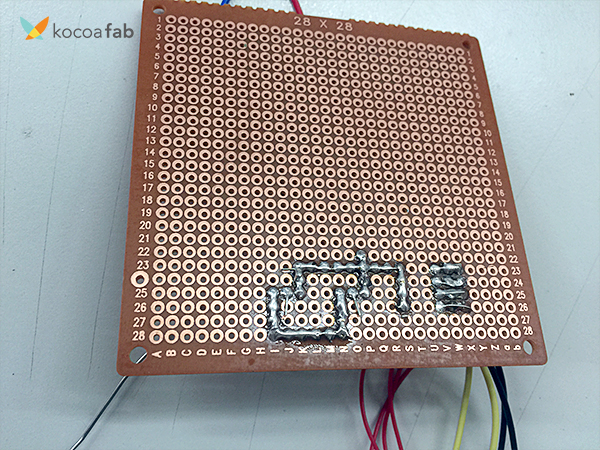
11. 납땝한 전선은 만능기판이나 브레드보드에 연결하여 저항 10K 옴과 연결합니다.
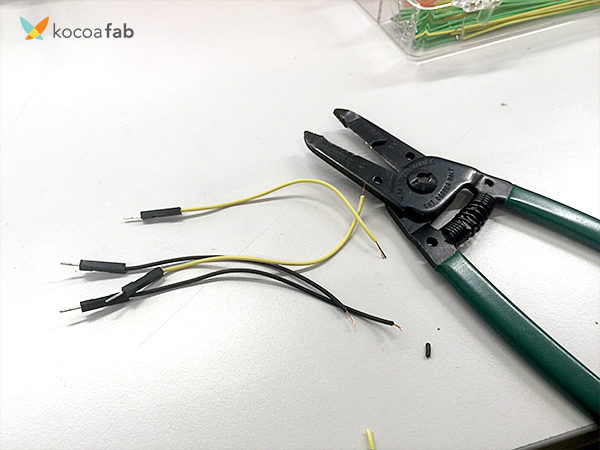
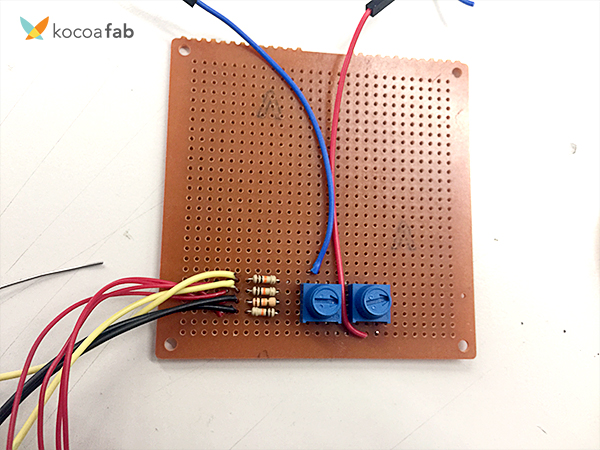
12.아두이노와 연결하기 쉽도록 점퍼케이블을 잘라 납땜하였습니다.
여기서 점퍼케이블은 각각의 아날로그 핀과 연결하고,
각각의 10k옴은 아래의 '가변저항'의 GND와 만나 아두이노의 GND로 통합하여 연결해 줍니다.
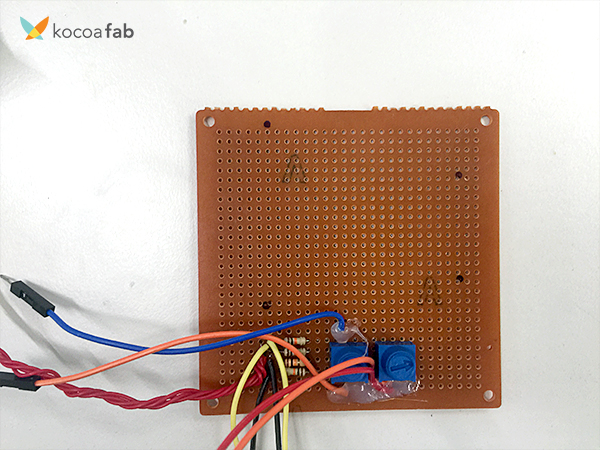
13.이번에는 가변저항을 연결해 보겠습니다.
가변저항은 A4, A5에 연결되며,
이는 각각 서보모터의 속도(A4)와 각도 범위(A5)를 설정하는 역할을 합니다.
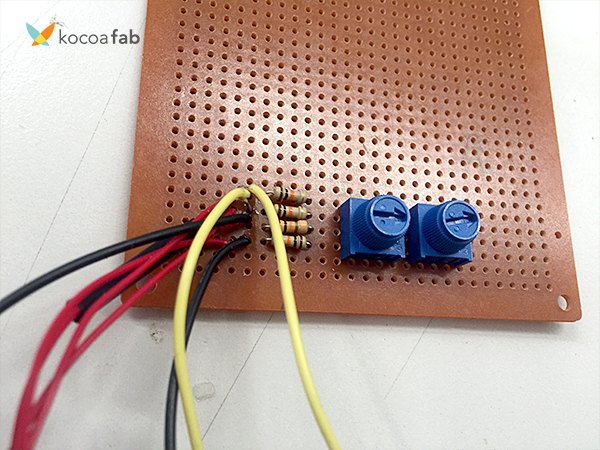
14. 2개의 가변저항의 GND와 10K옴 저항의 끝을 연결한 모습입니다.
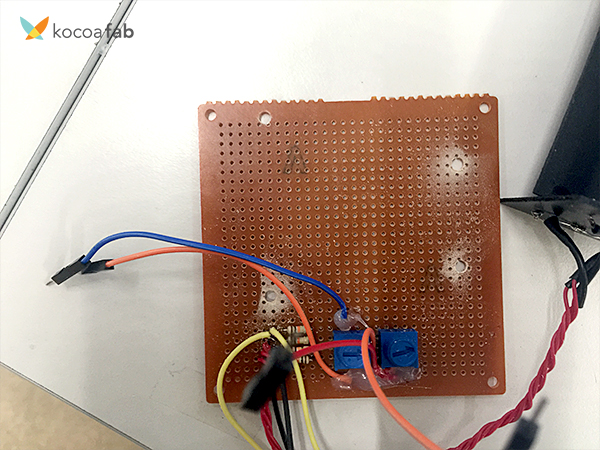
15.이번에는 가변저항의 +극을 서로 연결하여 줍니다.
16. 통합된 +극과 -극을 2개의 점퍼케이블과 연결해 주었습니다.
18.점퍼케이블은 연선이기 때문에 단단히 고정되어지지 않으면 쉽게 끊어지기 때문에
글루건을 이용하여 연결부에 유격이 없도록 고정하였습니다.
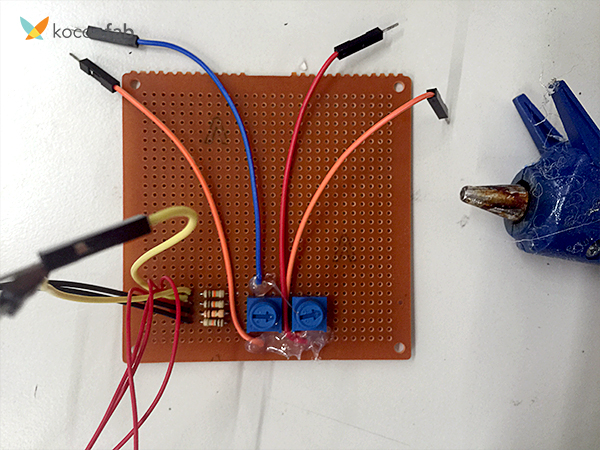
19. 전선이 많아 복잡하니 한번 정리해 주도록 합니다.
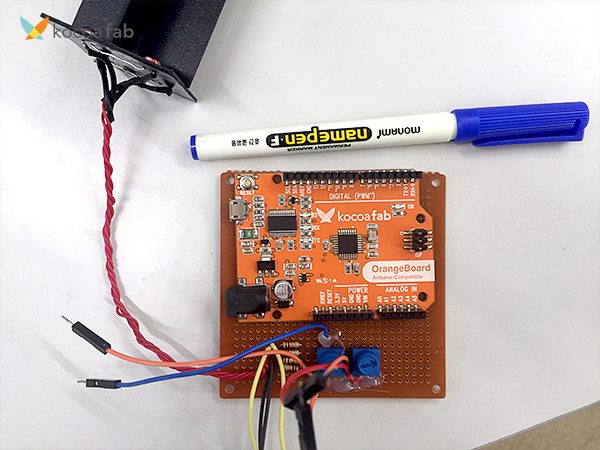
20. 만능기판 한쪽에 아두이노를 고정해 보도록 하겠습니다.
유성매직이나 네임펜등을 이용하여 자리를 잡고 볼트가 들어갈 자리를 체크합니다.
21. 체크된 자리를 '드레멜'로 구멍을 뚫어 볼트 혹은 나사가 들어갈 자리를 만들어 줍니다.
22. 회로를 연결하고 PCB에 고정한 모습입니다.
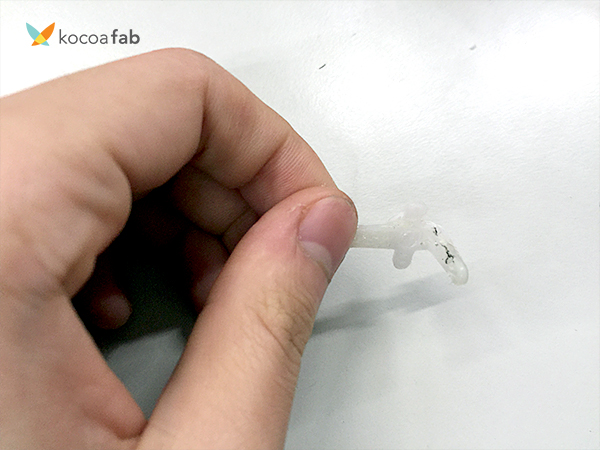
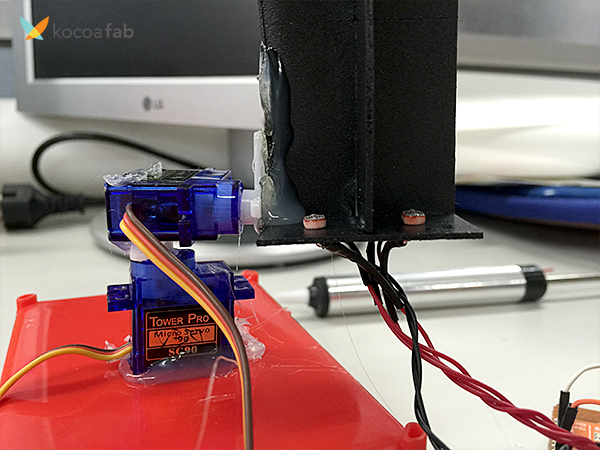
23. 이제 서보모터와 조도센서 파트를 연결해 보겠습니다.
먼저 서보모터에 연결되는 플라스틱 파츠중 긴 1자 날개 형태의 부속을
사진과 같이 한쪽날개를 접어줍니다.
한번 접어 라이터를 이용하여 열을 살짝 가해주면 형태가 직각 모양으로 만들어 집니다.
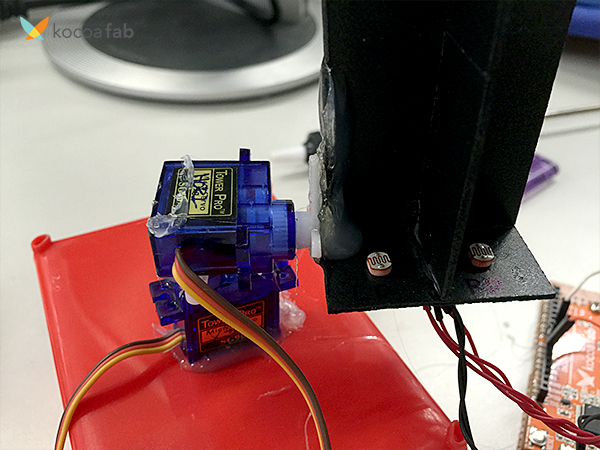
사진과 같이 디지털 10번에 연결된 서보모터를 아래에 두고(가로축 담당)
디지털 9번에 연결된 서보모터에 직각 날개를 끼운뒤 조도센서 파츠와 연결합니다.
이때 조도 센서 파츠의 방향은
| A0 (왼쪽 탑- LT) | A2(오른쪽 탑-RT) |
| A1 (왼쪽 다운 - LD) | A3(오른쪽 다운-RD) |
으로 방향을 놓고 파츠 왼쪽에 서보모터를를 고정해 줍니다.
24.완성된 모습입니다.
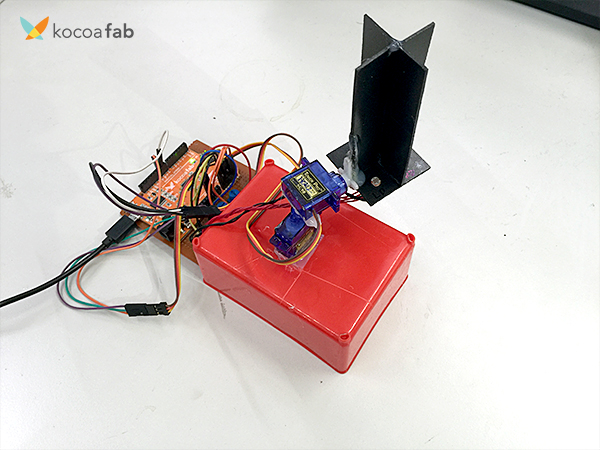
3D 프린팅이 가능하신 분들은 아래의 stl 파일을 출력하여 만들어 보세요 :)
FL3S7CFI4IX2PVO.stl
소프트웨어 Coding
아래의 소스코드를 아두이노에 업로드 합니다.
동영상
솔러 트래커의 작동 영상입니다.
빛을 따라 이리 저리 움직이는 모습을 확인할 수 있습니다.

hihyo
 아두이노,조도센서,서보모터,빛센서,Cds,빛추적,솔라트래커
아두이노,조도센서,서보모터,빛센서,Cds,빛추적,솔라트래커

서보모터 연결핀에 대해 궁금해 질문드립니다.
소스에는
horizontal.attach(9);
vertical.attach(10);
이렇게 되어 있는데, 위 설명에서 보면,
디지털 10번에 연결된 서보모터를 아래에 두고(가로축 담당)
디지털 9번에 연결된 서보모터가 위쪽이고, 세로축 담당인거 같아서 소스와 상반되어 보입니다.
horizontal.attach(9);가 세로축 인가요?

solarsolar 2015-06-20 22:04:41
이작품을 아트메가 128로 만들고싶은데, 코딩부분에서 많이 다른가요??