|
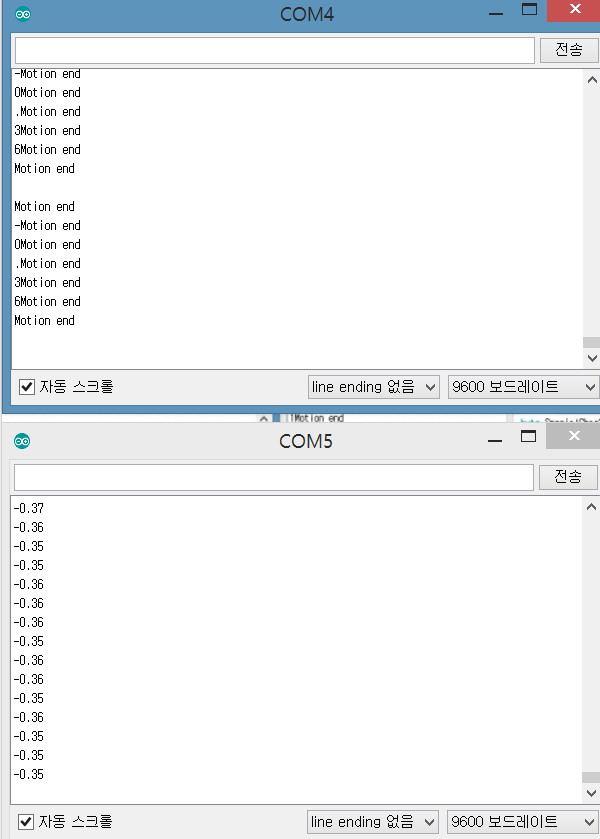
(COM4:수신부 /COM5:송신부)COM5 로드셀 값을 받아 COM4서 받아들여 그 값을 출력하면서 동시에 인체감지센서의 감지결과를 출력하고 로드셀 값이 30이상이 될경우 서브모터가 작동되지 않게 하는 코딩입니다. 그런데 수신부에서 byte형으로 받아들여서 그런지 33.8라는 숫자를 받아들였으면 위의 그림처럼 한줄에 첫번째자릿수,인체감지센서결과/두번째자릿수,인체감지센서결과/세번째 자릿수,이런식으로 나와서 서브모터가 항상 작동해 버립니다.어떤식으로 해야 숫자가 한번에 나올 수 있을까요??
//수신부
#include <Servo.h>
Servo myservo;
int pos=0;
int inputPin=2;
int PIR_val=0;
void setup()
{
myservo.attach(5);
pinMode(4,INPUT_PULLUP);
Serial.begin(9600);
pinMode(inputPin,INPUT);
}
void loop()
{
while(Serial.available()){
byte data = Serial.read();
PIR_val=digitalRead(inputPin);
if(digitalRead(4)==LOW)
{
if((data<30)&&(PIR_val==HIGH))
{
Serial.println("Motion detected!"); Serial.write(data);
for (pos = 0; pos <= 65; pos += 1)
{ myservo.write(pos);
delay(10);}
delay(2000);
for (pos = 65; pos >= 0; pos -= 1)
{ myservo.write(pos);
delay(10);}
delay(5000);
}
else {Serial.println("Motion end");Serial.write(data); myservo.write(0);}
}
else myservo.write(0);}
}
------------------------------------------------------------------------------------------------
//송신부
#include <LiquidCrystal.h>
#include "HX711.h"
#define calibaration_factor -7050.0
#define DOUT 3
#define CLK 2
HX711 scale(DOUT, CLK);
LiquidCrystal lcd(8, 9, 10, 11, 12, 13);
byte SpecialChar1[8] = { B01001, B10101, B10101, B01001, B00001, B10000, B10000, B11111};
byte SpecialChar2[8] = { B01000, B10101, B01001, B00011, B11101, B01001, B10000, B11111};
byte SpecialChar3[8] = { B00000, B00100, B00100, B00000, B00000, B00100, B00100, B00000};
byte SpecialChar4[8] = { B11101, B10111, B10101, B11111, B00001, B01110, B10001, B01110};
void setup()
{
Serial.begin(9600);
scale.set_scale(calibaration_factor);
scale.tare();
lcd.begin(16, 2);
lcd.createChar(0, SpecialChar1);
lcd.createChar(1, SpecialChar2);
lcd.createChar(2, SpecialChar3);
lcd.createChar(3, SpecialChar4);
for(int i = 0; i<3 ; i++)
{
lcd.setCursor(i, 0);
lcd.write(byte(i));
}
}
void loop()
{
Serial.println(scale.get_units());
lcd.setCursor(3,0);
if(scale.get_units()>0&&scale.get_units()<3){lcd.print(" ");lcd.print(0);lcd.write(byte(3));}
else if(scale.get_units()>3&&scale.get_units()<15){lcd.print(" ");lcd.print(1);lcd.write(byte(3));}
else if(scale.get_units()>15&&scale.get_units()<30){lcd.print(" ");lcd.print(2);lcd.write(byte(3));}
else if(scale.get_units()>30&&scale.get_units()<50){lcd.print(" ");lcd.print(3);lcd.write(byte(3));}
else if(scale.get_units()>50){lcd.setCursor(3,0);lcd.print("FULL");lcd.print(" ");}
}
|




