2014-10-13 10:14:42
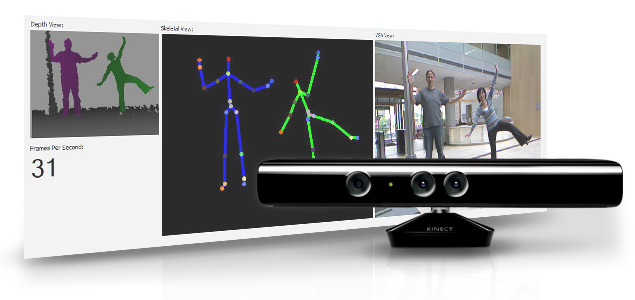
'Kinect가 있으면 컨트롤러가 필요 없습니다. 리모컨도 필요 없습니다. 바로 여러분만 있으면 됩니다. 필요한 것은 그뿐입니다.'
Microsoft사에서 Kinect를 소개 할 때 쓴 말입니다. 소개글과 같이 Kinect는 다른 조작 컨트롤러를 사용하지 않고 사람의 온몸을 이용하여 게임을 컨트롤 하게 합니다.
이런 놀라운 기능으로 인해 2010년 11월 Kinect가 처음 출시 되었을 때 엄청난 이슈를 불러왔고, 결국 세상에서 가장 빨리 팔린 제품으로 기네스북에 오른 전자 제품이 되었습니다.
밑의 동영상을 보시면 손동작만으로 TV를 제어 하고, 온몸을 움직여 게임을 컨트롤 하는 등 다양하게 사용되어지고 있는 것을 알 수 있습니다.

| NO | 부품명 | 수량 | 상세설명 |
| 1 | 오렌지 보드 | 1 | 아두이노 |
| 2 | 키넥트 | 1 | 키넥트 |
| 3 | 블루투스 모듈(HC-05) | 1 | 블루투스 |
| 4 | 바그래프 LED | 1 | LED |
| 5 | 220Ω 저항 | 10 | 저항 |
| 6 | 브레드보드 | 1 | 브레드보드 |
| 7 | 점퍼케이블 | 16 | 점퍼케이블 |
| 부품명 | 오렌지보드 | 키넥트 | 블루투스 모듈 |
| 파트 |  |
 |
 |
| 부품명 | 바그래프 | 220Ω저항 | 브레드보드 | 점퍼케이블 |
| 파트 |  |
 |
 |
 |
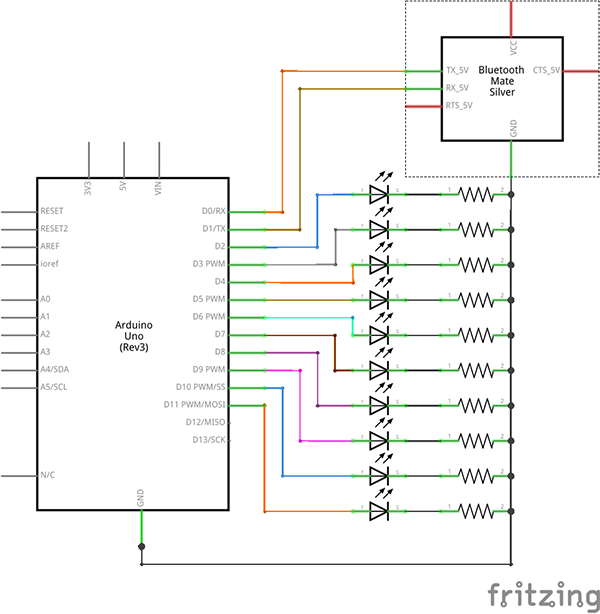
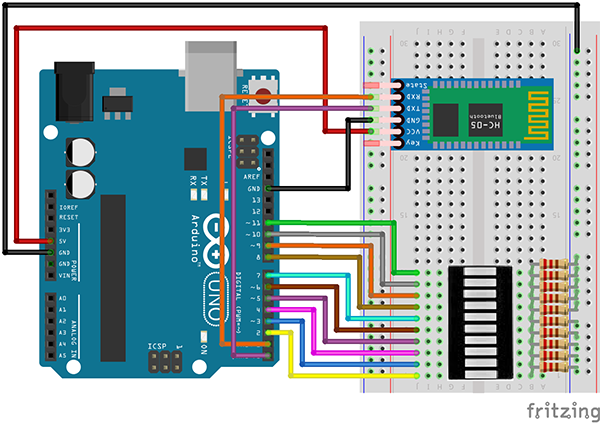
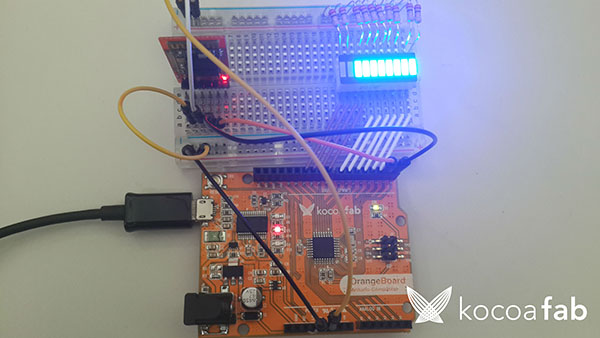
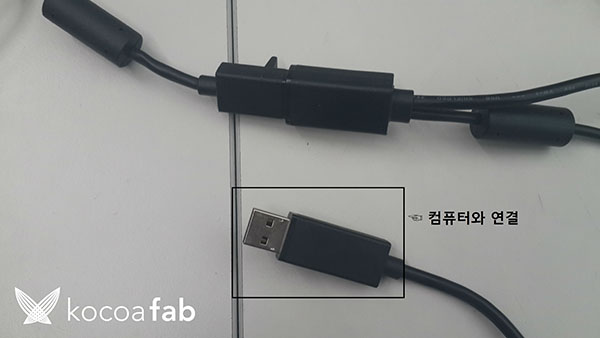
Kinect 본체와 연결된 USB와 전원에 있는 USB 단자를 연결 하시고, 따로 전원에 있는 USB를 컴퓨터와 연결해 줍니다.
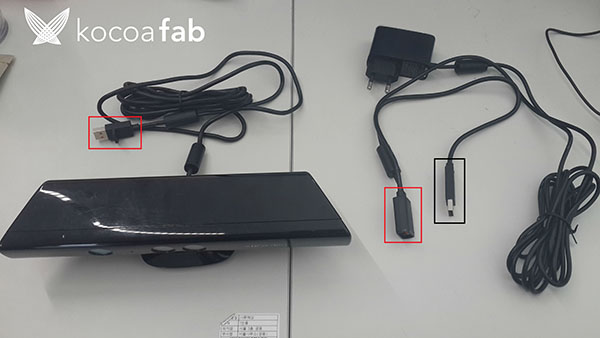
빨간 네모 안의 있는 것 끼리 연결하고, 검은 네모 안에 있는 USB를 컴퓨터와 연결합니다.(밑의 사진 참고)
* 바그래프 LED연결하는 방법은 가변저항을 이용하여 바그래프LED 제어하기 를 참고 하시기 바랍니다.
소프트웨어 Coding
아두이노 소스
* 본 소스는 스케치를 사용하여 작성 / 업로드 합니다. 스케치에 대한 사용법은 링크를 참고 하시기 바랍니다.
* 밑의 프로세싱 소스를 작성하시기 전에 아두이노 소스를 작성, 업로드 하시기 바랍니다.
* 아두이노에 소스를 업로드 시킨 후, 아두이노와 USB가 연결되지 않아도 프로세싱 소스를 사용하실 수 있습니다..(블루투스를 사용해서 연결함)
* 본 소스를 수정 했을 경우, 밑의 프로세싱 소스도 수정해야 합니다. 수정 하실 경우 밑의 설명을 읽고 수정하시기 바랍니다.
#include <SoftwareSerial.h>
SoftwareSerial BTSerial(0, 1); //
const int ledCount = 10; // LED 바그래프에 내장된 LED 갯수를 선언합니다.
int ledPins[] = {
2, 3, 4, 5, 6, 7, 8, 9, 10, 11 };
// LED 바그래프의 각각의 LED와 연결된 핀번호를 배열로 선언합니다.
void setup() {
for (int thisLed = 0; thisLed < ledCount; thisLed++) { //배열된 LED핀을 출력으로 설정합니다.
pinMode(ledPins[thisLed], OUTPUT);
}
BTSerial.begin(9600);
Serial.begin(9600);
}
void loop() {
if(BTSerial.available()){ // 블루투스 통신이 가능하면
byte data = BTSerial.read();
Serial.println(data);
// 블루투스에서 값을 받아옵니다.
// 배열된 LED에 아래의 조건을 반복합니다.
for (int thisLed = 0; thisLed < ledCount; thisLed++) {
// 배열된 LED가 받아온 값보다 작으면
// 할당된 값의 LED를 켭니다.
if (thisLed < data) {
digitalWrite(ledPins[thisLed], HIGH);
}
// 그렇지 않으면 LED를 끕니다.
else {
digitalWrite(ledPins[thisLed], LOW);
}
}
}
}
프로세싱 소스
* 밑의 소스는 프로세싱으로 작성 / 업로드 합니다. 프로세싱에 대한 사용법은 링크 를 보고 참고 하시기 바랍니다.
/* --------------------------------------------------------------------------
* SimpleOpenNI User Test
* --------------------------------------------------------------------------
* Processing Wrapper for the OpenNI/Kinect 2 library
* http://code.google.com/p/simple-openni
* --------------------------------------------------------------------------
* prog: Max Rheiner / Interaction Design / Zhdk / http://iad.zhdk.ch/
* date: 12/12/2012 (m/d/y)
* ----------------------------------------------------------------------------
*/
import processing.serial.*;
import java.awt.*;
import java.awt.event.KeyEvent;
import SimpleOpenNI.*;
Serial myPort;
PVector tempPos = new PVector();
SimpleOpenNI context;
color[] userClr = new color[] {
color(255, 0, 0),
color(0, 255, 0),
color(0, 0, 255),
color(255, 255, 0),
color(255, 0, 255),
color(0, 255, 255)
};
PVector com = new PVector();
void setup()
{
println(Serial.list());
String portName = Serial.list()[3];
myPort = new Serial(this, portName, 9600);
size(640, 480);
context = new SimpleOpenNI(this);
if (context.isInit() == false)
{
println("Can't init SimpleOpenNI, maybe the camera is not connected!");
exit();
return;
}
// enable depthMap generation
context.enableDepth();
// enable skeleton generation for all joints
context.enableUser();
background(200, 0, 0);
stroke(0, 0, 255);
strokeWeight(3);
smooth();
}
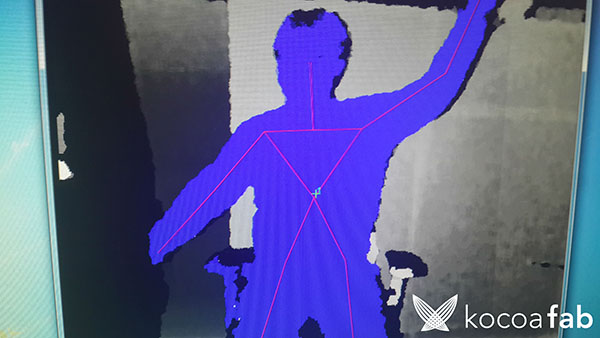
void draw()
{
// 카메라를 띄웁니다.
context.update();
image(context.userImage(), 0, 0);
// 사람이 인식이 되면 목록에 추가합니다..
int[] userList = context.getUsers();
// 인식된 사람 수만큼 스켈레톤을 그려줍니다.
for (int i=0; i<userList.length; i++)
{
if (context.isTrackingSkeleton(userList[i]))
{
stroke(userClr[ (userList[i] - 1) % userClr.length ] );
drawSkeleton(userList[i]);
}
if (context.getCoM(userList[i], com))
{
context.convertRealWorldToProjective(com, com2d);
stroke(100, 255, 0);
strokeWeight(1);
beginShape(LINES);
vertex(com2d.x, com2d.y - 5);
vertex(com2d.x, com2d.y + 5);
vertex(com2d.x - 5, com2d.y);
vertex(com2d.x + 5, com2d.y);
endShape();
fill(0, 255, 100);
text(Integer.toString(userList[i]), com2d.x, com2d.y);
}
}
}
// 스켈레톤을 그리는 함수(인식된 사람마다 각각 스켈레톤을 그립니다.)
void drawSkeleton(int userId)
{
try {
// PVector를 선언해서 오른손의 관절을 저장해 둡니다.
PVector jointRight = new PVector();
context.getJointPositionSkeleton(userId, SimpleOpenNI.SKEL_RIGHT_HAND, jointRight);
// PVector에 관절을 넣으면 해당 관절의 x, y, z값을 받아 올수 있습니다.
// y값(높이)를 이용해 오른손의 높이를 측정하여 일정이상 높이위로 올렸을 경우
// x값(좌우)를 받아 바그래프의 LED 수의 맞게(10개) 값을 재분배 하여 블루투스를 통해 아두이노로 전송합니다.
// PVector의 좌표 값들은 float값이므로 값 재분배를 한뒤 INT값으로 바꿔 줍니다.
if(jointRight.y > 100){
float temp = map(jointRight.x, -400, 400, 0, 10); // PVector의 X값 재분배
int imp = (int)temp; // INT로 변환
println(imp);
myPort.write(imp); // 블루투스를 통해 아두이노로 전송
}
}
catch(Exception e) {
}
context.drawLimb(userId, SimpleOpenNI.SKEL_HEAD, SimpleOpenNI.SKEL_NECK);
context.drawLimb(userId, SimpleOpenNI.SKEL_NECK, SimpleOpenNI.SKEL_LEFT_SHOULDER);
context.drawLimb(userId, SimpleOpenNI.SKEL_LEFT_SHOULDER, SimpleOpenNI.SKEL_LEFT_ELBOW);
context.drawLimb(userId, SimpleOpenNI.SKEL_LEFT_ELBOW, SimpleOpenNI.SKEL_LEFT_HAND);
context.drawLimb(userId, SimpleOpenNI.SKEL_NECK, SimpleOpenNI.SKEL_RIGHT_SHOULDER);
context.drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_SHOULDER, SimpleOpenNI.SKEL_RIGHT_ELBOW);
context.drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_ELBOW, SimpleOpenNI.SKEL_RIGHT_HAND);
context.drawLimb(userId, SimpleOpenNI.SKEL_LEFT_SHOULDER, SimpleOpenNI.SKEL_TORSO);
context.drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_SHOULDER, SimpleOpenNI.SKEL_TORSO);
context.drawLimb(userId, SimpleOpenNI.SKEL_TORSO, SimpleOpenNI.SKEL_LEFT_HIP);
context.drawLimb(userId, SimpleOpenNI.SKEL_LEFT_HIP, SimpleOpenNI.SKEL_LEFT_KNEE);
context.drawLimb(userId, SimpleOpenNI.SKEL_LEFT_KNEE, SimpleOpenNI.SKEL_LEFT_FOOT);
context.drawLimb(userId, SimpleOpenNI.SKEL_TORSO, SimpleOpenNI.SKEL_RIGHT_HIP);
context.drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_HIP, SimpleOpenNI.SKEL_RIGHT_KNEE);
context.drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_KNEE, SimpleOpenNI.SKEL_RIGHT_FOOT);
// 프로세싱을 실행 시킨 화면에 각 관절을 그려줍니다.
}
// -----------------------------------------------------------------
// SimpleOpenNI events
void onNewUser(SimpleOpenNI curContext, int userId)
// 인식된 사람의 userno을 지정한 후 스켈레톤을 그려줍니다.
{
println("onNewUser - userId: " + userId);
println("\tstart tracking skeleton");
curContext.startTrackingSkeleton(userId);
}
void onLostUser(SimpleOpenNI curContext, int userId)
// 인식된 사람이 화면에서 벗어 낫을 경우
{
println("onLostUser - userId: " + userId);
}
void onVisibleUser(SimpleOpenNI curContext, int userId)
{
//println("onVisibleUser - userId: " + userId);
}
void keyPressed()
{
switch(key)
{
case ' ':
context.setMirror(!context.mirror());
break;
}
}
소프트웨어 설명
아두이노
if(BTSerial.available()){ // 블루투스 통신이 가능하면
byte data = BTSerial.read();
Serial.println(data);
// 블루투스에서 값을 받아옵니다.
// 배열된 LED에 아래의 조건을 반복합니다.
for (int thisLed = 0; thisLed < ledCount; thisLed++) {
// 배열된 LED가 받아온 값보다 작으면
// 할당된 값의 LED를 켭니다.
if (thisLed < data) {
digitalWrite(ledPins[thisLed], HIGH);
}
// 그렇지 않으면 LED를 끕니다.
else {
digitalWrite(ledPins[thisLed], LOW);
}
}
}
블루투스 통신이 되면 받아온 값을 이용해 LED바의 LED를 키거나 끄는 소스입니다. 자세한 내용은 튜토리얼 가변저항을 이용하여 바그래프LED를 제어하기 를 참고 하시기 바랍니다.
(블루투스 통신으로 넘어온 값은 프로세싱에서 LED의 숫자에 맞게 값을 수정하여 보냅니다. 아두이노 스케치에서 따로 수정하실 필요 없습니다.)
프로세싱
- OpenNI 설치 및 예제 사용방법
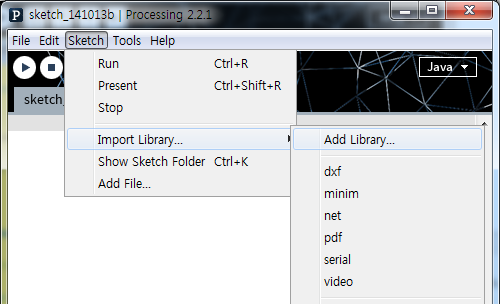
메뉴바에 Sketch -> Import Library... -> Add Library 를 선택하시면 밑의 화면과 같은 창이 나옵니다.
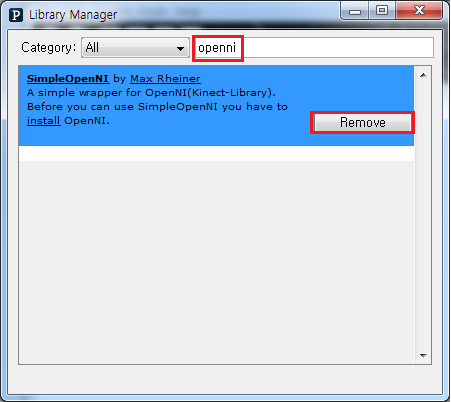
검색창에 openni를 검색하시면 위와 같이 하나가 나오는데 이것을 Install 하시면됩니다.
(현재는 설치가 되어서 Remove가 나오는데 Remove버튼이 있는 자리에 Install이 나옵니다.)
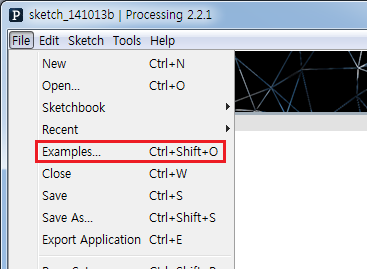
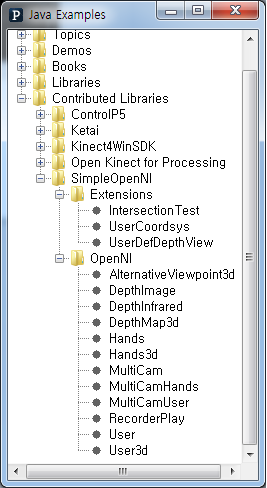
설치 후 File -> Examples.. 를 선택하시고 Contributed Libraries -> SimpleOpenNI 안에 있는 예제를 실행 하시면 프로세싱에서 가능한 키넥트 예제들을 사용하실 수 있습니다.
(이 컨텐츠에 있는 프로세싱 코드도 SimpleOpenNI 라이브러리를 설치 하셔야 실행이 됩니다.(예제는 안하셔도 됩니다. 이 컨텐츠에서 사용한 예제는 User 입니다.)
소스 설명
println(Serial.list()); String portName = Serial.list()[3]; myPort = new Serial(this, portName, 9600);
현재 연결된 시리얼 포트 번호를 출력하고, 나열된 포트 번호중 3번과 연결하여 9600bps 속도로 시리얼 통신을 합니다.
(포트번호는 0번부터 시작, 3번 포트는 4번째 있는 포트 입니다 COM31)

// PVector를 선언해서 오른손의 관절을 저장해 둡니다.
PVector jointRight = new PVector();
context.getJointPositionSkeleton(userId, SimpleOpenNI.SKEL_RIGHT_HAND, jointRight);
// PVector에 관절을 넣으면 해당 관절의 x, y, z값을 받아 올수 있습니다.
// y값(높이)를 이용해 오른손의 높이를 측정하여 일정이상 높이위로 올렸을 경우
// x값(좌우)를 받아 바그래프의 LED 수의 맞게(10개) 값을 재분배 하여 블루투스를 통해 아두이노로 전송합니다.
// PVector의 좌표 값들은 float값이므로 값 재분배를 한뒤 INT값으로 바꿔 줍니다.
if(jointRight.y > 100){
float temp = map(jointRight.x, -400, 400, 0, 10); // PVector의 X값 재분배
int imp = (int)temp; // INT로 변환
println(imp);
myPort.write(imp); // 블루투스를 통해 아두이노로 전송
context.drawLimb(userId, SimpleOpenNI.SKEL_HEAD, SimpleOpenNI.SKEL_NECK); context.drawLimb(userId, SimpleOpenNI.SKEL_NECK, SimpleOpenNI.SKEL_LEFT_SHOULDER); context.drawLimb(userId, SimpleOpenNI.SKEL_LEFT_SHOULDER, SimpleOpenNI.SKEL_LEFT_ELBOW); context.drawLimb(userId, SimpleOpenNI.SKEL_LEFT_ELBOW, SimpleOpenNI.SKEL_LEFT_HAND); context.drawLimb(userId, SimpleOpenNI.SKEL_NECK, SimpleOpenNI.SKEL_RIGHT_SHOULDER); context.drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_SHOULDER, SimpleOpenNI.SKEL_RIGHT_ELBOW); context.drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_ELBOW, SimpleOpenNI.SKEL_RIGHT_HAND); context.drawLimb(userId, SimpleOpenNI.SKEL_LEFT_SHOULDER, SimpleOpenNI.SKEL_TORSO); context.drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_SHOULDER, SimpleOpenNI.SKEL_TORSO); context.drawLimb(userId, SimpleOpenNI.SKEL_TORSO, SimpleOpenNI.SKEL_LEFT_HIP); context.drawLimb(userId, SimpleOpenNI.SKEL_LEFT_HIP, SimpleOpenNI.SKEL_LEFT_KNEE); context.drawLimb(userId, SimpleOpenNI.SKEL_LEFT_KNEE, SimpleOpenNI.SKEL_LEFT_FOOT); context.drawLimb(userId, SimpleOpenNI.SKEL_TORSO, SimpleOpenNI.SKEL_RIGHT_HIP); context.drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_HIP, SimpleOpenNI.SKEL_RIGHT_KNEE); context.drawLimb(userId, SimpleOpenNI.SKEL_RIGHT_KNEE, SimpleOpenNI.SKEL_RIGHT_FOOT); // 프로세싱을 실행 시킨 화면에 각 관절을 그려줍니다.

kocoafabeditor 
항상 진취적이고, 새로운 것을 추구하는 코코아팹 에디터입니다!
 키넥트, 아두이노, 오렌지보드
키넥트, 아두이노, 오렌지보드





