
초음파 거리 센서로 테레민만들기
2014-09-01 14:24:25
개요
테레민이라는 악기를 아시나요?테레민은 두 고주파 발진기의 간섭에 의해 생기는 소리를 이용하여 발명한 신시사이저 악기입니다.
가상의 줄 하나가 있다고 볼 수 있고 한 손으로는 높이, 한 손으로는 음의 세기를 조절한다고 생각하시면 됩니다.
본 프로젝트는 초음파 거리 센서를 사용하여 테리민을 만들려고 합니다.
초음파 거리 센서 2개를 사용하여 하나는 음량 조절용으로 사용하고
다른 하나로는 음 높이를 바꾸는 용도로 사용합니다.
출처 : www.ezdenki.com초음파 거리 센서 2개를 사용하여 하나는 음량 조절용으로 사용하고
다른 하나로는 음 높이를 바꾸는 용도로 사용합니다.
미리보기 동영상
시작 전 개념이해하기
부품목록
|
NO
|
부품명
|
수량
|
|
1
|
아두이노 보드 우노
|
1
|
|
2
|
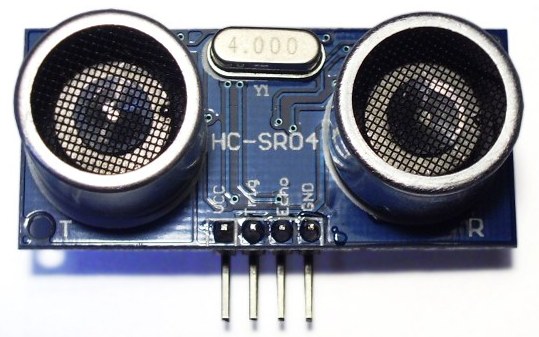
초음파 거리 센서
|
2
|
|
3
|
피에조 부저
|
1
|
|
4
|
점퍼 케이블
|
15
|
|
5
|
브레드보드
|
1
|
| 부품명 | 아두이노 보드 우노 | 초음파 거리 센서 | 피에조 부저 | 점퍼 케이블 | 브레드 보드 |
| 부품사진 |  X1 X1 |
 X2 X2 |
 X1 X1 |
 X15 X15 |
 X1 X1 |
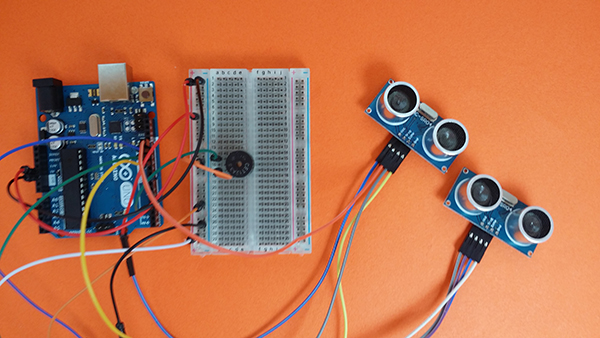
하드웨어 Making
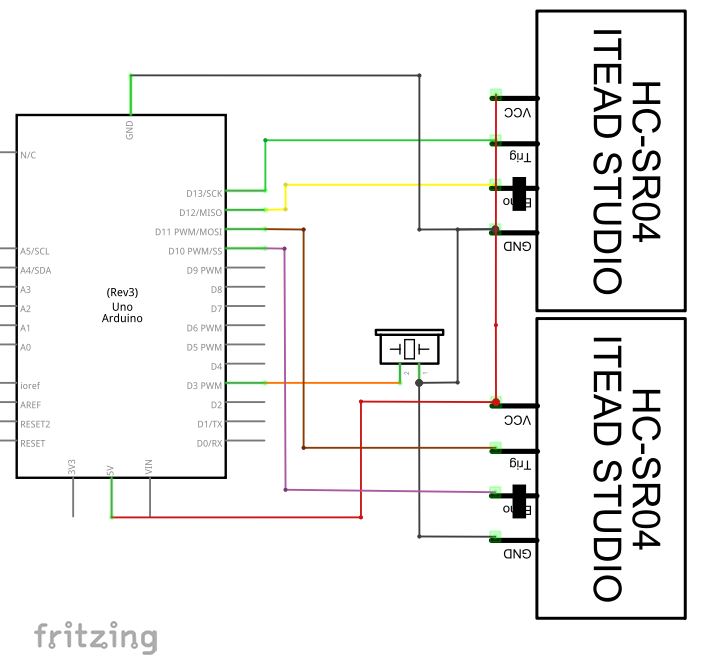
회로도
브레드보드 레이아웃
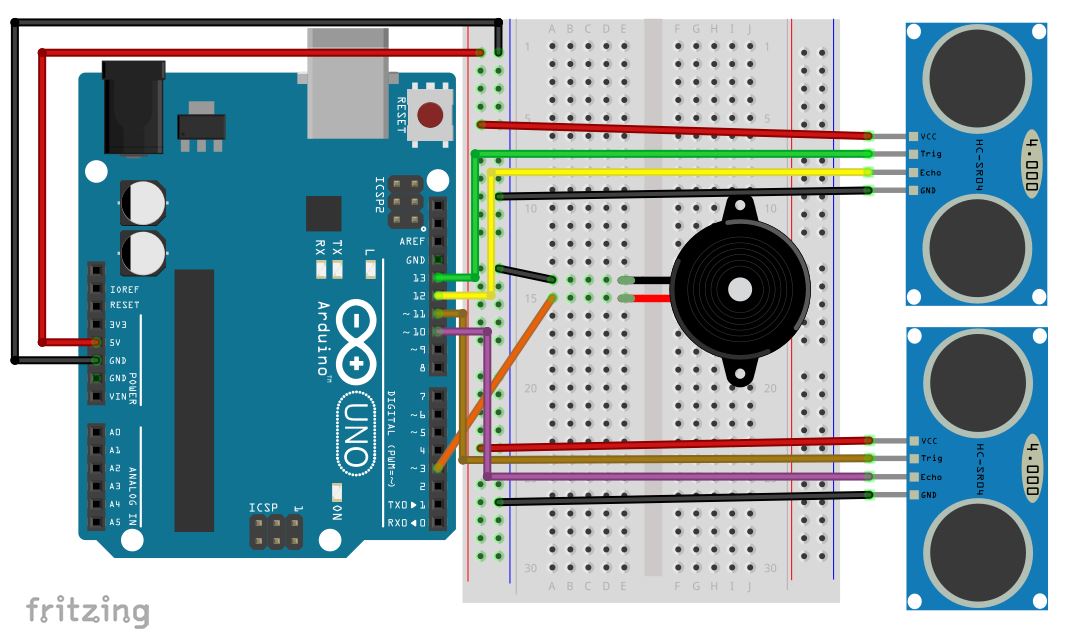
소프트웨어 Coding
아래의 코드를 아두이노에 업로드 합니다./*
초음파 거리 센서로 테레민 만들기
이 스케치는 kocoaFAB에서 만들었습니다.
누구나 무료로 사용하실 수 있습니다.
*/
//초음파 센서의 핀번호를 설정
//왼쪽 초음파 거리센서로 음을 바꾸고 오른쪽 초음파 거리센서로 음량 조절함
int echoPin = 12;
int trigPin = 13;
int echoPin_right = 10;
int trigPin_right = 11;
int piezoPin = 3; //피에조 부저센서의 핀번호를 설정
float duration, duration_right;
int amp = 0;
void setup(){
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(trigPin_right, OUTPUT);
pinMode(echoPin_right, INPUT);
// trig, trig_right를 출력모드로 설정, echo, echo_right를 입력모드로 설정
pinMode(piezoPin, OUTPUT);
//piezoPin을 출력모들 설정
}
void loop(){
digitalWrite(trigPin, HIGH);
delay(10);
digitalWrite(trigPin, LOW);
// 초음파를 보낸다. 다 보내면 echo가 HIGH 상태로 대기하게 된다.
duration = pulseIn(echoPin, HIGH); // echoPin 이 HIGH를 유지한 시간을 저장 한다.
digitalWrite(trigPin_right, HIGH);
delay(10);
digitalWrite(trigPin_right, LOW);
duration_right = pulseIn(echoPin_right, HIGH);
//아날로그 입력값의 범위로 바꿈
duration_right = constrain( map(duration_right, 0, 6000, 0, 1023), 0, 1023);
//음량과 음 높이를 변화시키는 함수 호출
changeVolume();
changeNote(duration, amp);
}
//거리에 따라 음량을 변화시키는 함수
void changeVolume() {
amp = duration_right / 10;
}
//거리에 따라 음 높이를 변화시키는 함수
void changeNote(float time, int amp) {
if((duration >0) && (duration < 400)) { //거리가 0이상 400이하면
for(long i = 0; i < 1000000; i=i+2552) { //도
digitalWrite(piezoPin,1);
delayMicroseconds(amp);
digitalWrite(piezoPin,0);
delayMicroseconds(2*1911 - amp);
}
} else if(duration < 800 ){ //거리가 800이하면
for(long i = 0; i < 1000000; i=i+2552) { //레
digitalWrite(piezoPin,1);
delayMicroseconds(amp);
digitalWrite(piezoPin,0);
delayMicroseconds(2*1702 - amp);
}
} else if(duration < 1200) { //거리가 1200이하면
for(long i = 0; i < 1000000; i=i+2552) { //미
digitalWrite(piezoPin,1);
delayMicroseconds(amp);
digitalWrite(piezoPin,0);
delayMicroseconds(2*1517 - amp);
}
} else if (duration < 1600) { //거리가 1600이하면
for(long i = 0; i < 1000000; i=i+2552) { //파
digitalWrite(piezoPin,1);
delayMicroseconds(amp);
digitalWrite(piezoPin,0);
delayMicroseconds(2*1431 - amp);
}
} else if (duration < 2000) { //거리가 2000이하면
for(long i = 0; i < 1000000; i=i+2552) { //솔
digitalWrite(piezoPin,1);
delayMicroseconds(amp);
digitalWrite(piezoPin,0);
delayMicroseconds(2 * 1276 - amp);
}
} else if (duration < 2400) { //거리가 2400이하면
for(long i = 0; i < 1000000; i=i+2552) { //라
digitalWrite(piezoPin,1);
delayMicroseconds(amp);
digitalWrite(piezoPin,0);
delayMicroseconds(2*1137 - amp);
}
} else if (duration < 2800) { //거리가 2800이하면
for(long i = 0; i < 1000000; i=i+2552) { //시
digitalWrite(piezoPin,1);
delayMicroseconds(amp);
digitalWrite(piezoPin,0);
delayMicroseconds(2*1012 - amp);
}
} else if (duration < 3200) { //거리가 2300이하면
for(long i = 0; i < 1000000; i=i+2552) { //도
digitalWrite(piezoPin,1);
delayMicroseconds(amp);
digitalWrite(piezoPin,0);
delayMicroseconds(2*995 - amp);
}
}
}
소프트웨어&하드웨어 설명
1. 스케치 설명
digitalWrite(trigPin, HIGH);
delay(10);
digitalWrite(trigPin, LOW);
// 초음파를 보낸다. 다 보내면 echo가 HIGH 상태로 대기하게 된다.
duration = pulseIn(echoPin, HIGH); // echoPin 이 HIGH를 유지한 시간을 저장 한다.
digitalWrite(trigPin_right, HIGH);
delay(10);
digitalWrite(trigPin_right, LOW);
duration_right = pulseIn(echoPin_right, HIGH);
//아날로그 입력값의 범위로 바꿈
duration_right = constrain( map(duration_right, 0, 6000, 0, 1023), 0, 1023);
왼쪽에 있는 초음파 거리 센서에서 echo 핀이 HIGH 였던 시간을 pulseln함수를 통해 받아옵니다.
이 값을 duration이라는 변수에 저장합니다. duration은 나중에 음 높이를 변화시킬 때 사용할 것입니다.
똑같이 오른쪽 초음파 거리 센서에서도 값을 받아와 duration_right에 저장합니다.
이 값은 음량을 변화시킬 때 사용할 것입니다.
초음파 거리 센서의 동작원리를 자세히 알고 싶으시면 이 링크를 참고하세요.
//아날로그 입력값의 범위로 바꿈
duration_right = constrain( map(duration_right, 0, 6000, 0, 1023), 0, 1023);
음량을 조절하기 위해서는 아날로그 입력 범위(0 ~ 1023)의 값이 필요합니다.
map, constrain함수를 통해 6000이하의 값을 0 ~ 1023 값의 범위로 바꿉니다.
void changeVolume() {
amp = duration_right / 10;
}
//거리에 따라 음 높이를 변화시키는 함수
void changeNote(float time, int amp) {
if((duration >0) && (duration < 400)) { //거리가 0이상 400이하면
for(long i = 0; i < 1000000; i=i+2552) { //도
digitalWrite(piezoPin,1);
delayMicroseconds(amp);
digitalWrite(piezoPin,0);
delayMicroseconds(2*1911 - amp);
}
또 더 먼 거리에 더 높은 옥타브를 추가하셔도 됩니다.
0에서 400이상에 거리에 있을 경우 도라는 음이 1초동안 나옵니다.
amp를 통해 디지털 출력이 1,0인 상태의 비율을 조절해서 음량을 조절합니다.
자세한 원리가 궁금하신 분은 이 링크를 참고하세요.
기술문서
- 부품목록
- 브레드보드 레이아웃
- 회로도
- 스케치





kocoafab
 테레민, 초음파 거리 센서, 음 높이 바꾸기, 음량 바꾸기
테레민, 초음파 거리 센서, 음 높이 바꾸기, 음량 바꾸기
