
에스플로라와 프로세싱을 이용한 미로탈출 게임 만들기
2016-01-27 00:24:02
|
프로젝트 개요 |
아두이노 에스플로라(Esplora)에는 가속도 센서가 내장되어 있습니다.
가속도 센서는 어떤 방향의 움직임으로 가속도가 있어도 감지할 수 있지만, 지구의 중력도 가속도로서 감지할 수 있습니다.
이 기능을 이용하면 기울기 센서로도 쓸 수 있습니다.
HW: 아두이노 에스플로라
SW: 프로세싱3.0.1
최종 결과
센서의 작동 유무를 테스트하는 중간 과정
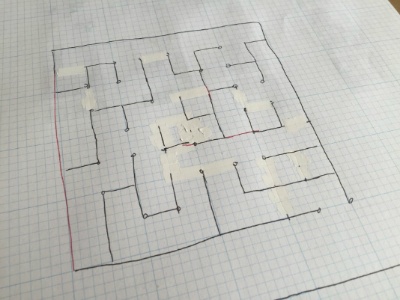
미로 설계
센서의 작동을 테스트하는 과정 및 미로 설계는 여러분이 해야 할 일은 아닙니다. 지금은 이런 과정을 거치는구나 하고 넘어가시기 바랍니다.
|
연결 방법 |
에스플로라 보드를 PC에 연결하는 것 외에 다른 특별한 연결 방법은 없습니다.

|
아두이노 보드 소스 (인용시 출처를 명시해 주세요.) |
#include <Esplora.h>
void setup()
{
Serial.begin(9600); // initialize serial communications with your computer
}
void loop()
{
int xAxis = (Esplora.readAccelerometer(X_AXIS) - 30)/2; // read the X axis
int yAxis = (Esplora.readAccelerometer(Y_AXIS) - 35)/2; // read the Y axis
int zAxis = (Esplora.readAccelerometer(Z_AXIS) - 0)/2; // read the Z axis
Serial.write(xAxis);
Serial.print(" ");
Serial.write(yAxis);
Serial.print(" ");
Serial.write(zAxis);
Serial.println(" ");
delay(100); // wait half a second (500 milliseconds)
}
|
프로세싱 소스 (인용시 출처를 명시해 주세요.) |
PC쪽 프로그램은 프로세싱으로 작성하였습니다.
프로세싱 소스를 작동시키려면 프로세싱 최신 버전을 다운 받아 설치하세요. https://processing.org/download/?processing
import processing.serial.*;
Serial myPort;
float xRot = 0;
float yRot = 0;
int hWall = 30;
int wall[][] =
{
{-400, -400, 800, 0}, {-400, -400, 0, 800}, {-400, -200, 100, 0}, {-300, -300, 0, 100}, {-300, -300, 100, 0},
{-200, -300, 0, 100}, {-100, -300, 0, 200}, {0, -300, 0, 100}, {100, -300, 0, 400}, {100, -300, 100, 0},
{300, -300, 0, 200}, {300, -300, 100, 0}, {0, -200, 100, 0}, {200, -200, 100, 0}, {400, -400, 0, 800},
{-300, -100, 200, 0}, {100, -100, 100, 0}, {-300, -100, 0, 200}, {-200, -100, 0, 100}, {0, -100, 0, 100},
{0, 0, 100, 0}, {-100, 0, 0, 100}, {200, 0, 0, 100}, {300, 0, 0, 100}, {-400, 100, 100, 0},
{-100, 100, 400, 0}, {-200, 100, 0, 200}, {-300, 100, 100, 0}, {200, 200, 200, 0}, {-300, 200, 0, 200},
{-100, 200, 0, 100}, {0, 200, 0, 200}, {100, 200, 0, 100}, {-200, 300, 100, 0}, {100, 300, 300, 0},
{-400, 400, 700, 0}
};
float xBall = 50;
float yBall = -350;
float vxBall = 0;
float vyBall = 0;
void setup()
{
size(1280, 768, P3D);
myPort = new Serial(this, Serial.list()[1], 9600);
setup2();
}
void setup2()
{
xBall = 50;
yBall = -350;
vxBall = 0;
vyBall = 0;
}
void draw()
{
background(255);
float fov = PI/6.0;
float cameraZ = (height/2.0) / tan(fov/2.0);
perspective(fov, float(width)/float(height), cameraZ/2.0, cameraZ*2.0);
camera(width/2, height/2, cameraZ, width/2, height/2, 0, 0, 1, 0);
lights();
translate(width/2, height/2);
rotateX(1.3);
pushMatrix();
int nBuffer = 0;
byte[] inBuffer = new byte[1024];
if (myPort.available() > 0)
{
nBuffer = myPort.readBytes(inBuffer);
myPort.readBytes(inBuffer);
if (nBuffer == 8)
{
int x = -inBuffer[2];
if (x > 0) x = max(x - 1, 0);
if (x < 0) x = min(x + 1, 0);
xRot = x/200.0;
xRot = constrain(xRot, -PI/8, PI/8);
int y = -inBuffer[0];
if (y > 0) y = max(y - 1, 0);
if (y < 0) y = min(y + 1, 0);
yRot = y/200.0;
yRot = constrain(yRot, -PI/8, PI/8);
}
}
noFill();
stroke(0, 255, 0);
{
pushMatrix();
translate(0, 0, 0);
box(1024, 1024, 1);
popMatrix();
}
rotateX(xRot);
rotateY(yRot);
fill(255);
stroke(64);
{
pushMatrix();
translate(0, 0, -1);
box(800, 800, 1);
popMatrix();
}
for (int n = 0; n < wall.length; n++)
{
pushMatrix();
translate(wall[n][0] + wall[n][2]/2 - 2, wall[n][1] + wall[n][3]/2 - 2, hWall/2);
box(wall[n][2] + 5, wall[n][3] + 5, hWall);
popMatrix();
}
vxBall += yRot;
vyBall -= xRot;
if (abs(vxBall) > 10) vxBall = vxBall*10/abs(vxBall);
if (abs(vyBall) > 10) vyBall = vyBall*10/abs(vyBall);
xBall += vxBall;
yBall += vyBall;
float tollerence = 23;
for (int n = 0; n < wall.length; n++)
{
if ((wall[n][0] - tollerence*0.9) < xBall && (wall[n][0] + wall[n][2] + tollerence*0.9) > xBall && wall[n][2] > 0)
{
if (abs(wall[n][1] - yBall) < tollerence)
{
if (wall[n][1] < yBall)
{
yBall++;
vyBall = 0;
} else
{
yBall--;
vyBall = 0;
}
}
}
if ((wall[n][1] - tollerence*0.9) < yBall && (wall[n][1] + wall[n][3] + tollerence*0.9) > yBall && wall[n][3] > 0)
{
if (abs(wall[n][0] - xBall) < tollerence)
{
if (wall[n][0] < xBall)
{
xBall++;
vxBall = 0;
} else
{
xBall--;
vxBall = 0;
}
}
}
}
{
fill(255, 0, 0);
noStroke();
pushMatrix();
translate(xBall, yBall, 20);
sphere(20);
popMatrix();
}
if(yBall > 420) setup2();
popMatrix();
}





자바실험실

