|
1. 프로젝트 사용한 보드 종류
아두이노LEONARDO
2. 사용한 개발 프로그램명
에어마우스
3. 사용한 센서 모델명
MPU6050
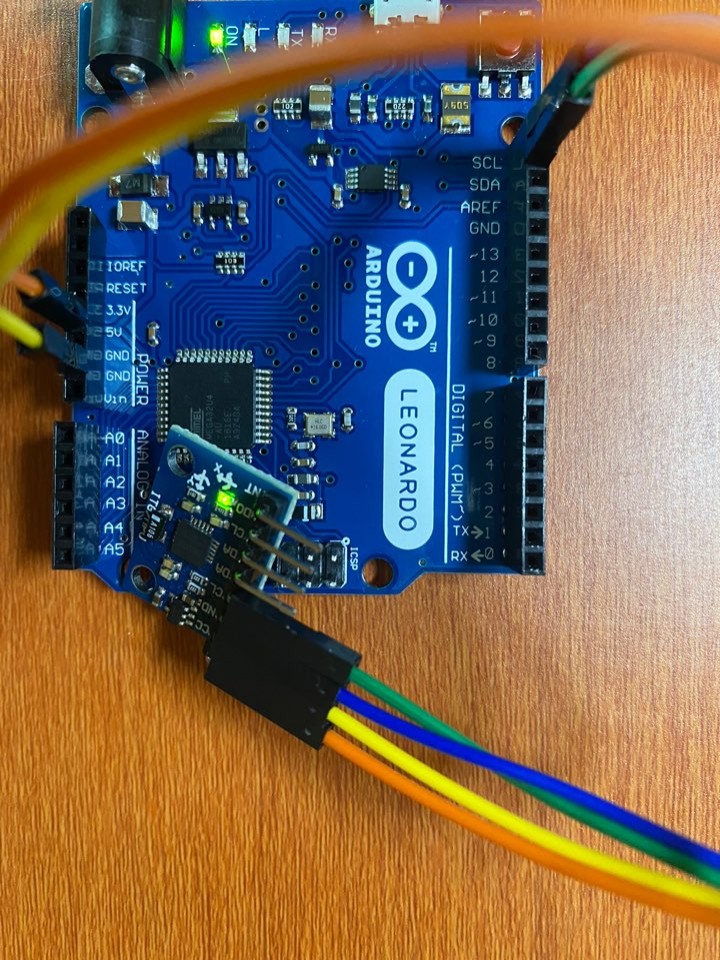
4. 연결한 회로 설명 (또는 이미지)
5. 소스코드 (주석 필수)
#include <Wire.h>
#include <Mouse.h>
#include "Kalman.h"
int16_t gyroX, gyroZ;
int Sensitivity = 600;
int delayi = 3;
uint32_t timer;
uint8_t i2cData[14]; // Buffer for I2C data
const uint8_t IMUAddress = 0x68; // AD0 is logic low on the PCB
const uint16_t I2C_TIMEOUT = 1000; // Used to check for errors in I2C communication
uint8_t i2cWrite(uint8_t registerAddress, uint8_t data, bool sendStop) {
return i2cWrite(registerAddress,&data,1,sendStop); // Returns 0 on success
}
uint8_t i2cWrite(uint8_t registerAddress, uint8_t* data, uint8_t length, bool sendStop) {
Wire.beginTransmission(IMUAddress);
Wire.write(registerAddress);
Wire.write(data, length);
return Wire.endTransmission(sendStop); // Returns 0 on success
}
uint8_t i2cRead(uint8_t registerAddress, uint8_t* data, uint8_t nbytes) {
uint32_t timeOutTimer;
Wire.beginTransmission(IMUAddress);
Wire.write(registerAddress);
if(Wire.endTransmission(false)) // Don't release the bus
return 1; // Error in communication
Wire.requestFrom(IMUAddress, nbytes,(uint8_t)true); // Send a repeated start and then release the bus after reading
for(uint8_t i = 0; i < nbytes; i++) {
if(Wire.available())
data[i] = Wire.read();
else {
timeOutTimer = micros();
while(((micros() - timeOutTimer) < I2C_TIMEOUT) && !Wire.available());
if(Wire.available())
data[i] = Wire.read();
else
return 2; // Error in communication
}
}
return 0; // Success
}
void setup() {
Serial.begin(9600);
Wire.begin();
i2cData[0] = 7; // Set the sample rate to 1000Hz - 8kHz/(7+1) = 1000Hz
i2cData[1] = 0x00; // Disable FSYNC and set 260 Hz Acc filtering, 256 Hz Gyro filtering, 8 KHz sampling
i2cData[3] = 0x00; // Set Accelerometer Full Scale Range to ±2g
while(i2cWrite(0x19,i2cData,4,false)); // Write to all four registers at once
while(i2cWrite(0x6B,0x01,true)); // PLL with X axis gyroscope reference and disable sleep mode
while(i2cRead(0x75,i2cData,1));
if(i2cData[0] != 0x68) { // Read "WHO_AM_I" register
Serial.print(F("Error reading sensor"));
while(1);
}
delay(100); // Wait for sensor to stabilize
/* Set kalman and gyro starting angle */
while(i2cRead(0x3B,i2cData,6));
timer = micros();
Mouse.begin();
}
void loop() {
/* Update all the values */
while(i2cRead(0x3B,i2cData,14));
gyroX = ((i2cData[8] << 8) | i2cData[9]);
gyroZ = ((i2cData[12] << 8) | i2cData[13]);
gyroX = gyroX / Sensitivity / 1.1 * -1;
gyroZ = gyroZ / Sensitivity * -1;
Serial.print("\t");
Serial.print(gyroX);
Serial.print(gyroZ);
Mouse.move(gyroZ, gyroX);
Serial.print("\r\n");
delay(delayi);
}
6. 문제점 및 에러 내용
컴파일과 업로드에는 문제가 없으나 실제로 작동을 하지 않습니다. 시리얼 모니터에도 아무것도 안뜨고요.....
|




