|
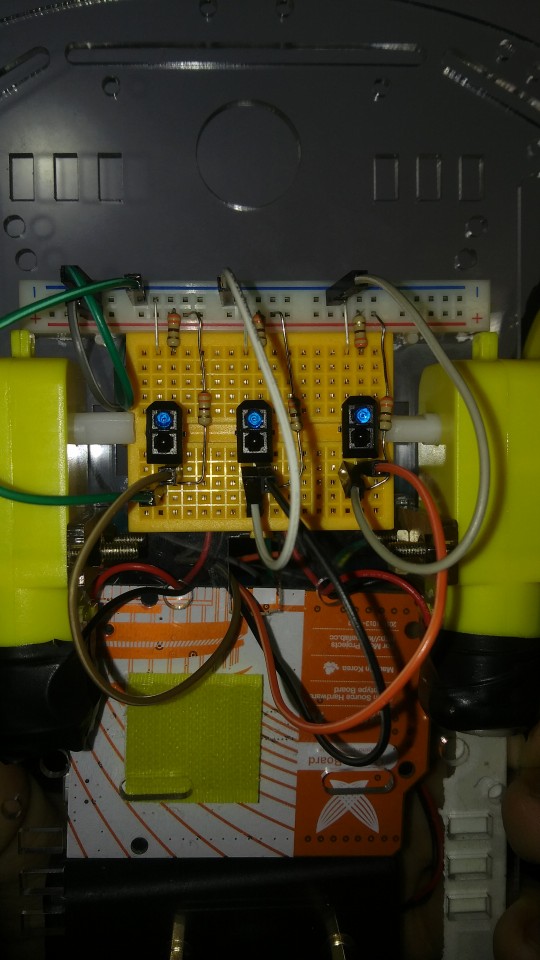
라인트레이서를 만드려고 tcrt5000 센서를 사용하였는데
센서값을 읽어오지를 못합니다.
센서를 제외하고 모터제어하는 부분은 작동하는것을 확인하엿습니다.
코드부분과 함께 올리겠습니다.
코드에서 값을 계속 바꿔도 안되네요 ㅠㅠ
#define MOTORA_PIN1 7
#define MOTORA_PIN2 8
#define MOTORA_PIN3 12
#define MOTORA_PIN4 13
void motor_CW(int speed) //backward
{
analogWrite (MOTORA_PIN1, speed);
digitalWrite (MOTORA_PIN2, LOW);
analogWrite (MOTORA_PIN3, speed);
analogWrite (MOTORA_PIN4, LOW);
delay(10);
}
void motor_CCW(int speed) //foward
{
analogWrite (MOTORA_PIN1, 255-speed);
digitalWrite (MOTORA_PIN2, HIGH);
analogWrite (MOTORA_PIN3, 255-speed);
digitalWrite (MOTORA_PIN4, HIGH);
}
void motor_RIGHT(int speed)//right
{
analogWrite (MOTORA_PIN1, 255-speed);
digitalWrite (MOTORA_PIN2, HIGH);
analogWrite (MOTORA_PIN3, speed);
digitalWrite (MOTORA_PIN4, LOW);
delay(10);
}
void motor_LEFT(int speed)
{
analogWrite (MOTORA_PIN1, speed);
digitalWrite (MOTORA_PIN2, LOW);
analogWrite (MOTORA_PIN3, 255-speed);
digitalWrite (MOTORA_PIN4, HIGH);
delay(10);
}
void motor_STOP(int speed)//stop
{
analogWrite (MOTORA_PIN1, speed);
digitalWrite (MOTORA_PIN2, LOW);
analogWrite (MOTORA_PIN3, speed);
digitalWrite (MOTORA_PIN4, LOW);
}
void setup() {
Serial.begin(9600);
// put your setup code here, to run once:
pinMode (MOTORA_PIN1, OUTPUT);
pinMode (MOTORA_PIN2,OUTPUT);
}
void loop() {
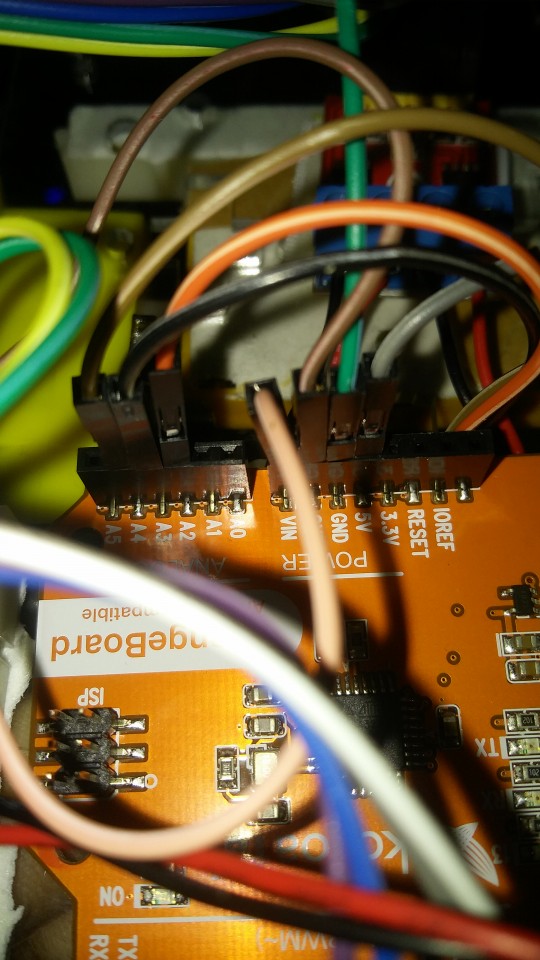
// A2 : 왼쪽, A3 : 가운데, A4 : 오른쪽 센서와 연결되어 있습니다.
if(analogRead(A4) > 100 && analogRead(A3) > 100 && analogRead(A2) > 100){
// 3개의 센서가 모두 인식이 됬을 경우는 멈춰있습니다.
analogWrite(7, 0);
analogWrite(8, 0);
}
else if(analogRead(A2) > 100 && analogRead(A3) < 100 && analogRead(A4) < 100){
// 왼쪽 센서만 인식했을 경우 왼쪽으로 이동합니다.
motor_LEFT(255);
}
else if(analogRead(A4) > 500 && analogRead(A3) < 500 &&analogRead(A2) < 500){
// 오른쪽 센서만 인식했을 경우 오른쪽으로 이동합니다,
motor_RIGHT(255);
}
else if(analogRead(A3) > 800){
// 가운데 센서가 인식 했을 경우 앞으로 이동합니다.
motor_CCW(255);
}
}
/////////////
|
| 다음글 |
GPS 데이터의 시리얼 모니터 출력
|
2016-02-12 |




