
DC 모터-사용하기
2015-01-16 14:09:25
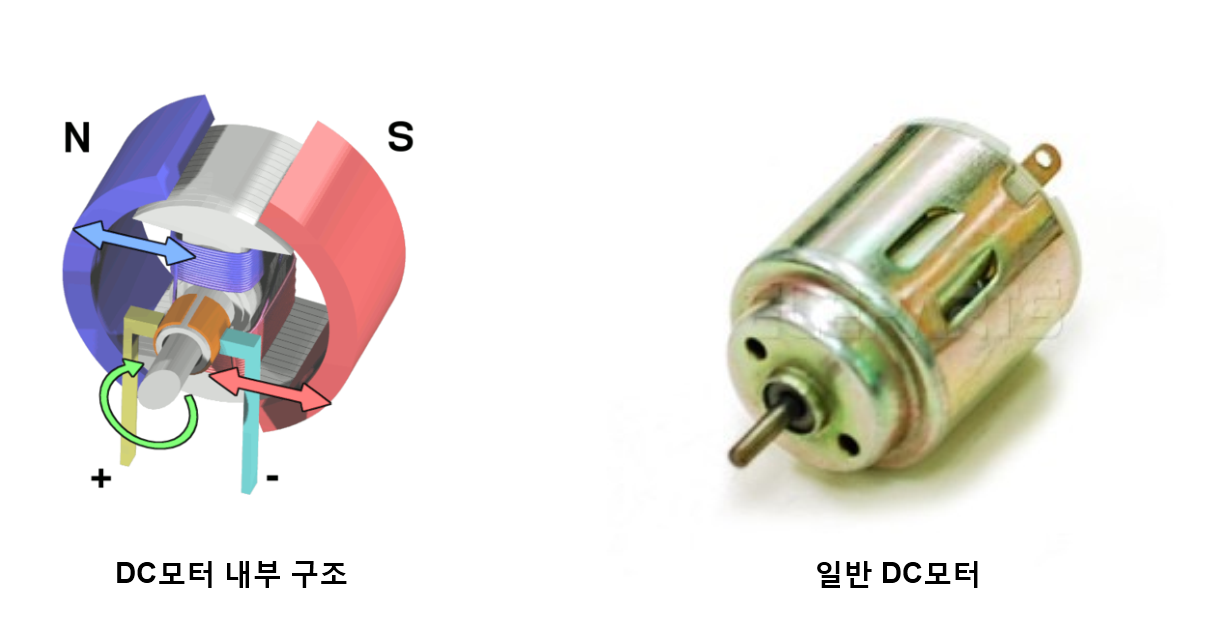
DC모터란?
DC모터 사용방법
부품 목록
| NO | 부품명 | 수량 | 상세설명 |
| 1 | 오렌지 보드 | 1 | |
| 2 | DC모터 | 1 | |
| 3 | 스위치 | 1 | |
| 4 | 330Ω 저항 | 1 | |
| 5 | 다이오드 | 1 | |
| 6 | 트랜지스터 | 1 | |
| 7 | 브레드 보드 | 1 | |
| 8 | 점퍼 케이블 | 9 |
| 부품명 | 오렌지 보드 | DC모터 | 스위치 | 330Ω 저항 |
| 파트 |  |
 |
 |
 |
| 다이오드 | 트랜지스터 | 브레드 보드 | 점퍼 케이블 | |
| 파트 |  |
 |
 |
 |
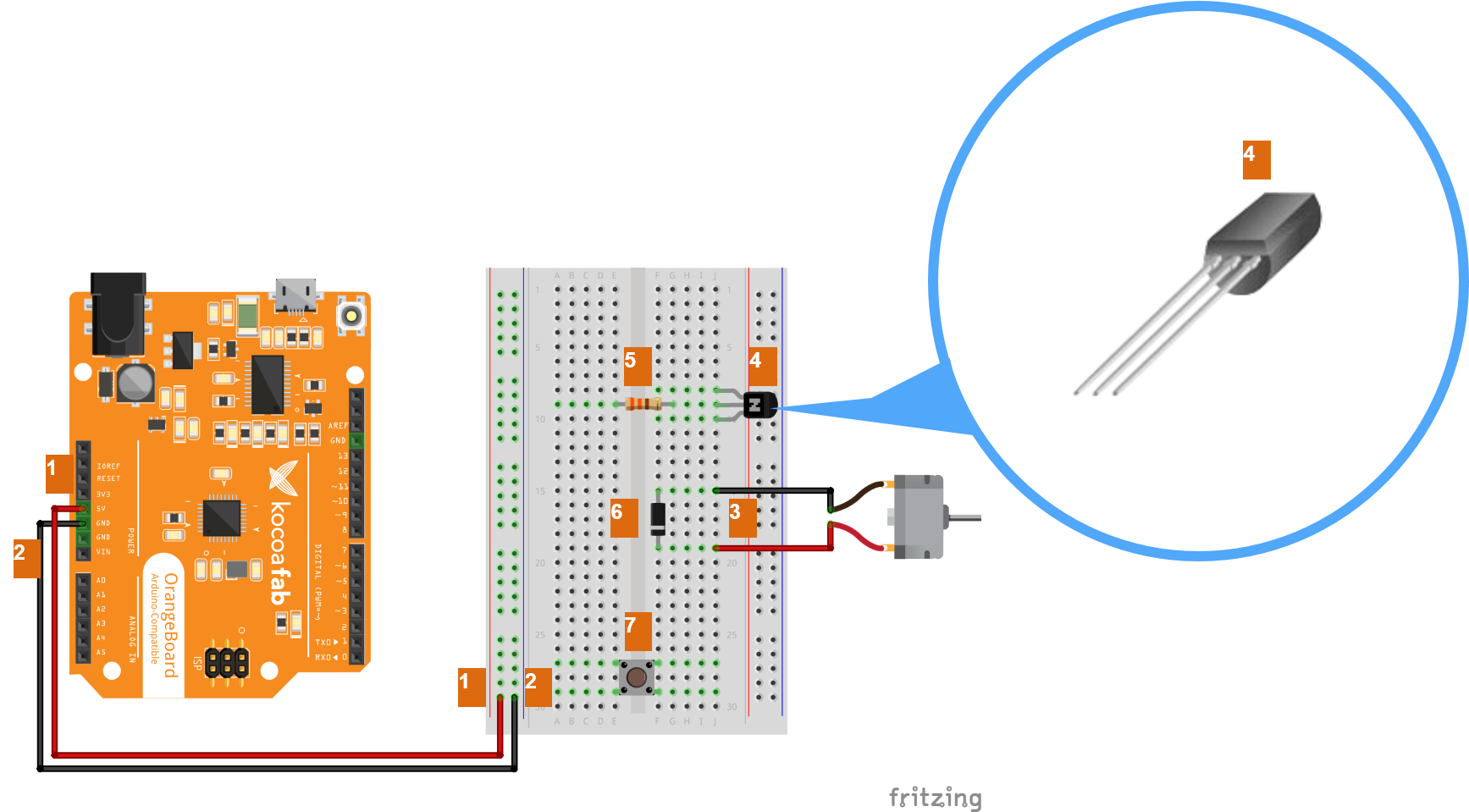
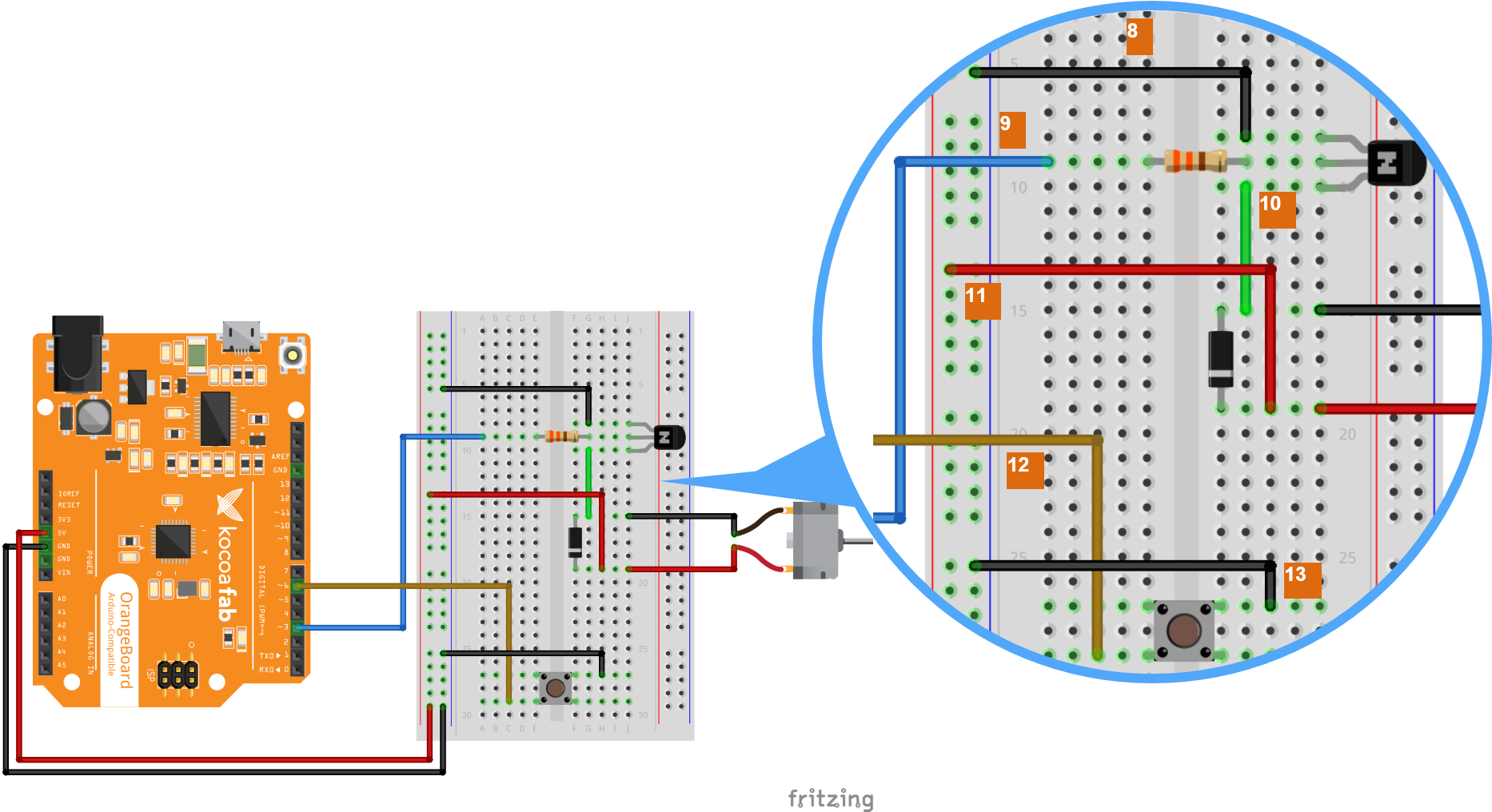
하드웨어 making
소프트웨어 coding
-
/*
-
제목 : DC모터 돌리기
-
내용 : 스위치를 누를때마다 DC모터가 회전하도록 해봅시다.
-
*/
-
-
// DC모터를 3번 핀으로 설정하고, 스위치의 핀을 6번으로 설정합니다.
-
int motor = 3;
-
int sw = 6;
-
-
// DC모터의 회전 속도를 정의합니다.
-
// 디저털 핀으로 0~255 범위의 값으로 DB모터의 속도를 제어할 수 있습니다.
-
// 모터가 제대로 동작하지 않는다면, speed 값을 상향조정합니다. (예 200)
-
int speed = 127;
-
-
// 실행시 가장 먼저 호출되는 함수이며, 최초 1회만 실행됩니다.
-
// 변수를 선언하거나 초기화를 위한 코드를 포함합니다.
-
void setup() {
-
//스위치가 연결되는 핀은 PULL-UP회로로 사용합니다.
-
pinMode(sw, INPUT_PULLUP);
-
}
-
-
// setup() 함수가 호출된 이후, 호출되는 함수입니다.
-
// 블록 안의 코드를 무한히 반복 실행합니다.
-
void loop() {
-
// 스위치가 눌렸다면
-
if (digitalRead(sw) == LOW) {
-
// DC모터가 연결된 핀으로, 지정된 speed로 회전하도록 설정합니다.
-
// 본 예제에서 사용된 127이란 값은, 디지털 핀으로 출력 할 수 있는 최대값 255의 절반에 해당되므로,
-
// DC모터가 5V 전류로 낼 수 있는 최대 회전 속도의 절반으로 해석 할 수 있습니다.
-
// 이는 디지털로 아날로그 신호를 보내는 펄스 폭 모듈레이션(PWM)에서 duty-cycle이 50%인 것으로 설정됩니다.
-
// 오렌지보드 디지털 핀의 PWM 주파수를 약 500Hz로 가정하면, 1초에 255번만 HIGH 신호를 보내는 것과 같습니다.
-
analogWrite(motor, speed);
-
}
-
-
// 스위치가 연결된 핀의 로직레벨이 HIGH라면,
-
// 스위치가 열려있는 상태(누르지 않은 상태) 이므로, 아래의 블록을 실행합니다.
-
else {
-
// DC모터가 연결된 핀으로, duty-cycle을 0%로 설정하여 DC모터를 멈추게 합니다.
-
analogWrite(motor, 0);
-
}
-
}
analogWrite()와 PWM
아두이노는 컴퓨터의 CPU와 같은 MCU를 가지고 있으며 전기로 동작하는 디지털도구로 볼 수 있습니다.
때문에 모든 값은 디지털신호인 0과 1로 출력되는 것이 일반적이지만 이렇게 되면 모든 동작은 ON/OFF로 밖에 구분되지 못합니다.
디지털로 출력되는 신호를 자연스럽게 올라가고 내려가는(속도가 증가하고 내려가는) 동작으로 출력하기 위해서는 아날로그의 신호가 필요한데, 이때 아두이노에서는 아날로그 신호를 만들기 위해서 PWM(Pulse Width Modulation)기법을 사용하게 되며 PWM을 통해 디지털 신호를 아날로그신호와 같이 사용이 가능합니다.
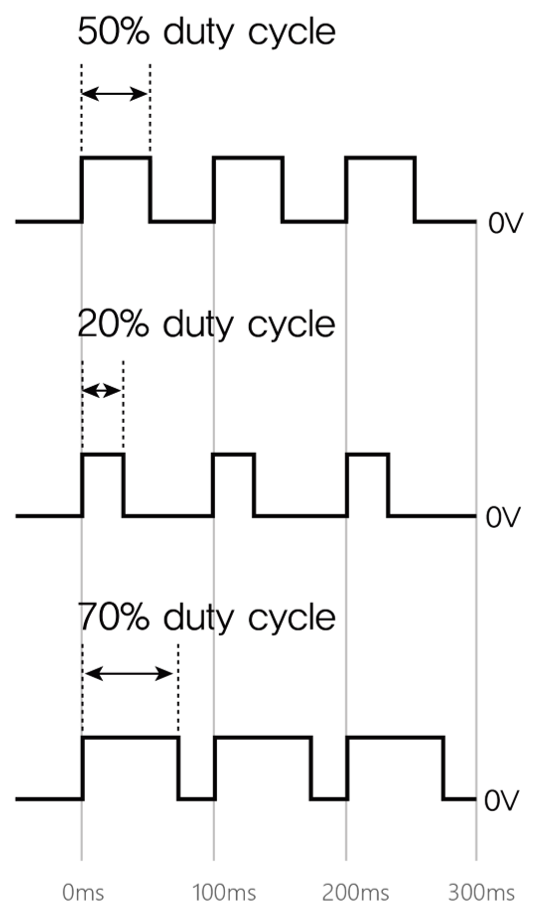
<구형파의 주기 중 HIGH신호가 차지하는 비율로 아날로그 신호를 만든다>
PWM은 사진과 같이 1과 0이 되는 비율을 조절하여 아날로그 신호를 만들게 되며, 이것은 전체 시간에서 HIGH가 차지하는 비율로 아날로그 값을 출력합니다.
가령 1초의 주기를 가지는 파형에서 0.5초는 HIGH신호, 나머지 0.5초는 LOW신호를 주게되면 전체 전압의 절반을 출력하게 되며,
1초의 주기에서 0.2초는 HIGH신호, 0.8초는 LOW신호를 주면 20%의 전압을 출력하는 것과 같습니다.
analogWrite()에 들어가는 값의 크기는 최소 0부터 최대 255까지이며 그 안에서 수치 조절이 가능합니다.
PWM핀은 아두이노 내에서 ~(tilt)표시로 체크되며 디지털 3, 5, 6, 9, 10, 11번 핀이 PWM핀으로 사용 가능합니다.
※ PWM으로 analogWrite()를 사용하는 핀은 pinMode()를 통해 OUTPUT을 할 필요가 없습니다.
예를 들어 3번핀에서 analogWrite()를 사용할 경우 pinMode(3,OUTPUT)을 따로 선언하지 않아도 동작합니다.
코드 실행
위 코드에서는 모터의 속도를 127로 제한했기 때문에 DC모터는 최대 속도의 절반속도로 동작합니다.
PWM신호를 사용하기 때문에 PWM핀 중 하나인 디지털 3번 핀을 사용하며, 버튼이 눌렸을 경우 동작하며 눌리지 않을 경우 동작하지 않습니다.
만약 모터의 동작전압이 높을 경우 127로는 동작하지 않을 수 있으니 그 때는 speed에 255의 신호를 주어 사용해보세요.





kocoafabeditor 
항상 진취적이고, 새로운 것을 추구하는 코코아팹 에디터입니다!
 DC모터, 아두이노, 오렌지보드
DC모터, 아두이노, 오렌지보드
