2015-04-20 13:59:36
지난 시간 (모터 드라이버 모듈 사용하기 1) 모터 드라이버의 원리에 대해서 간단히 알아보았습니다.
이번 시간엔 직접 H-Bridge 회로를 만들고 모터를 제어하는 실습을 하도록 하겠습니다 ^^
H-Bridge 회로는 TR 또는 FET의 스위치 특성을 이용하여 극성을 바꿔 줌으로써 정방향 역방향 제어를 해주는 회로 입니다.
일반적인 용도로 가장 많이 사용하는 KSP2222A(npn tr) 4개 만을 이용하여 회로를 구성해보겠습니다.
TR만으로 구성할 수 있는 회로는 다음과 같습니다.
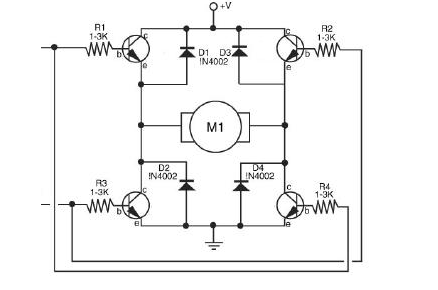
(저항 : 과전류 방지용, 다이오드 : 모터의 역기전력 방지용)
위 회로에서 TR의 베이스 부분에 High(5V)를 인가할 경우 콜렉터(C)와 에미터(E)가 Short 되어 전류가 흐르게 되고
Low(0V)를 인가할 경우 콜렉터(C)와 에미터(E)가 Open되어 전류가 흐르지 않게 됩니다.
따라서 1번 TR과 4번 TR의 베이스에 High를 입력하고, 2번과 3번 TR의 베이스에 LOW를 입력하게 되면
다음과 같이 전류가 흐르게 됩니다.
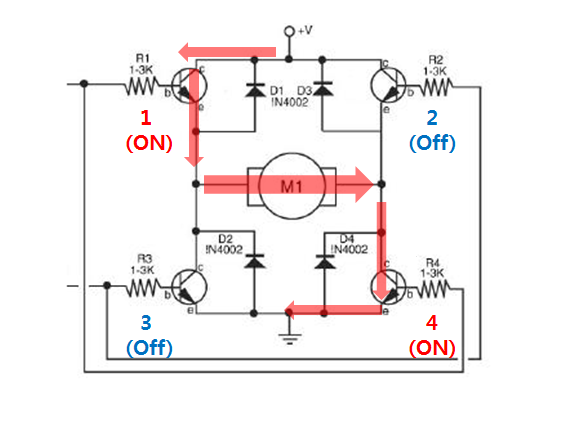
이와 반대로 2번과 3번 TR의 베이스에 High 그리고 1번과 4번 TR의 베이스에 Low를 인가해 주면 반대 방향으로
돌게 된다는 것을 바로 아실거에요 ^^
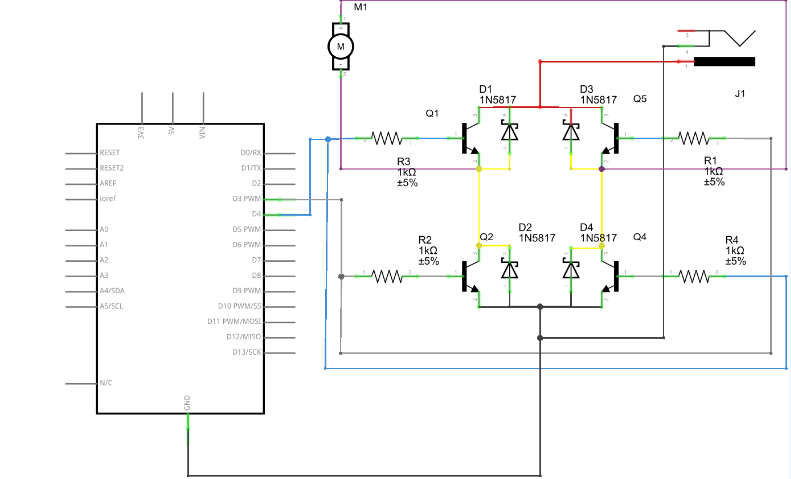
위의 회로도를 바탕으로 아두이노를 이용해 모터드라이버가 제대로 동작하는지 테스트를 하겠습니다~
| No | PART | Qty | Etc |
| 1 | 오렌지 보드 | 1 | |
| 2 | TR | 4 | KSP2222A |
| 3 | DIODE | 4 | ln4002 |
| 4 | Resister | 4 | 1K |
| 5 | 점퍼선 | 다수 |
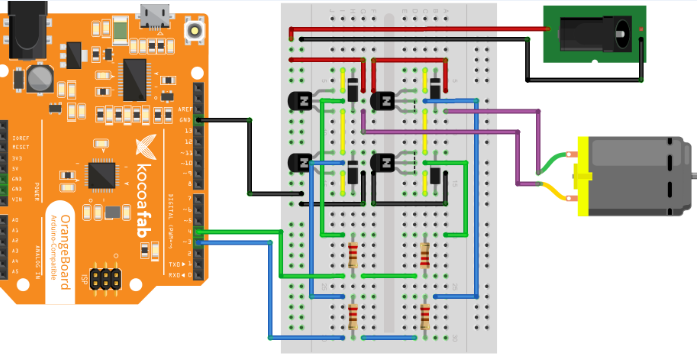
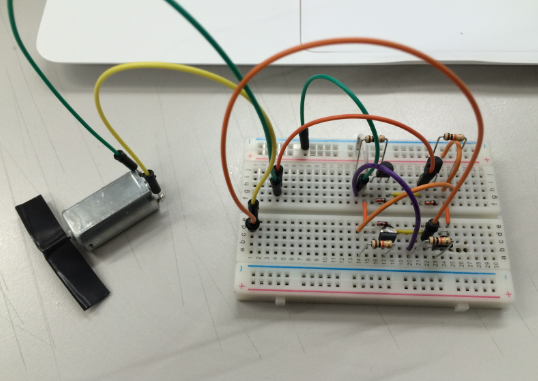
부품이 많이 필요한 회로가 아니라 간단하게 소형 빵판에 쏙 들어가네요 ^^
다음 영상은 아두이노의 3번 핀과 4번 핀을 2초간격으로 HIGH/LOW 상태로 번갈아가며 바꿔주었을 때 동작 영상입니다.
(3번핀 HIGH, 4번핀 LOW // 3번핀 LOW, 4번핀 HIGH)
모터가 다소 빠르게 돌아가 정확한 방향을 구분하기 어렵지만..
2초간격으로 모터가 멈춘것 처럼 보이는 부분이 방향을 바꾸는 시점입니다.
시판되고 있는 모든 모터 드라이버엔 위와 같은 H-Bridge회로 또는 H-Bridge 회로가 내장된 IC를 탑재되어 있습니다.
아두이노의 디지털 핀과 모터에 인가할 외부전원 등 사용법은 위의 H-Bridge회로와 동일 합니다.
이번 장의 실습에서는 TR만을 이용한 모터 드라이버 회로를 설계해 보았지만 그 밖에
N-Fet, P-Fet을 이용하거나 PNP, NPN을 이용하는 등 상호 보완적인 회로를 사용함으로써 전력 손실을 줄이는
방법도 있습니다. 사용자의 편의와 용도에 맞도록 장단점을 비교하여 설계를 하시면 되겠습니다 ^^.
( * TR과 FET는 과전류에 매우 민감한 소자입니다. 모터 드라이버를 설계 하실 땐 우선적으로 사용하고자 하는
모터의 정격과 공급전압을 고려하여 적정한 허용 용량을 가진 소자를 선별하여 설계를 하셔야 합니다. 데이터시트 참고는 필수!)

kocoafabeditor 
항상 진취적이고, 새로운 것을 추구하는 코코아팹 에디터입니다!
 모터 드라이버, 아두이노, 오렌지보드
모터 드라이버, 아두이노, 오렌지보드





