2016-01-11 09:47:41
최근에 가장 많이 사용하는 통신 주파수라면 2.4Ghz가 아닌가 싶습니다. WiFi는 물론이고 블루투스나 RF통신 모두 2.4Ghz의 통신 주파수를 사용하는데 2.4Ghz통신의 장점이라면 높은 주파수로 인해 수신감도가 좋고 상대적으로 원거리에서도 서로 통신이 가능합니다. 또 TV리모컨과 같이 수신부를 향하지 않더라도 서로 통신이 가능하다는 점이 장점입니다.
아두이노에서는 WiFi나 Bluetooth, Zigbee 등 다양한 통신 방법을 지원하는데 하지만 대부분 사용하기 위해서는 몇 만원 이상의 비용을 지불하고 비싼 모듈을 구매하여 사용해야 합니다.
(물론 WiFi는 인터넷과 연결할 수 있고 Bluetooth는 스마트폰과 연결할 수 있는 각각의 장점이 있긴 합니다ㅎㅎ)
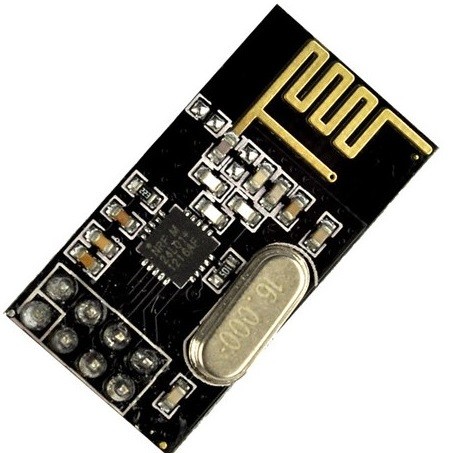
하지만 이 글에서 소개하는 nRF24L01모듈은 2.4Ghz로 통신하면서 상당히 저렴하고 크기도 작기 때문에 소형화와 통신 두가지를 모두 원하는 Maker에게는 최적의 모듈이 아닌가 생각합니다.
Kocoafab에서는 이 모듈을 샘플전자를 통해 약 3천~4천원 사이의 가격으로 구매했던 기억이 납니다.
상당히 저가이기때문에 사용하다 망가져도 상대적으로 부담이 적고, 성능또한 가격에 비해서 괜찮은 통신 유효거리를 보이기 때문에 사용방법만 익힌다면 보편적으로 사용해도 괜찮을 센서입니다.
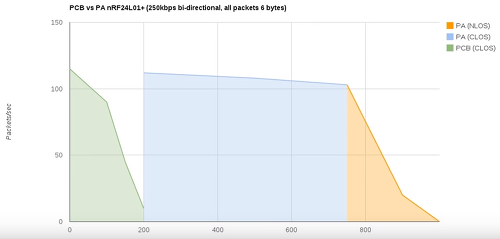
<위 센서인 PCB버전의 경우에는 200m정도까지의 통신 거리를 보인다>
이번 글에서는 WiFi나 블루투스에 비해 상대적으로 덜 알려져 있지만 통신모듈로 사용할 수 있는 nRF24L01모듈을 알아보고 간단한 튜토리얼을 사용해 보겠습니다.
| NO | 부품명 | 수량 | 상세설명 |
| 1 | 오렌지 보드 | 1 | 아두이노UNO 호환 |
| 2 | nRF24L01 모듈 | 1 | 2.4Ghz RF통신 |
| 3 | 점퍼케이블 | 10 | 암수 케이블(F/M cable) |
| 부품명 | 오렌지 보드 | nRF24L01 모듈 | 점퍼케이블 |
| 파트 | 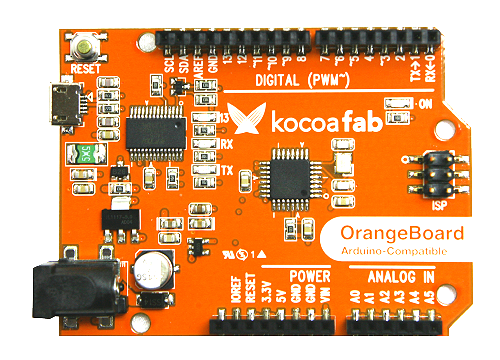 |
 |
 |
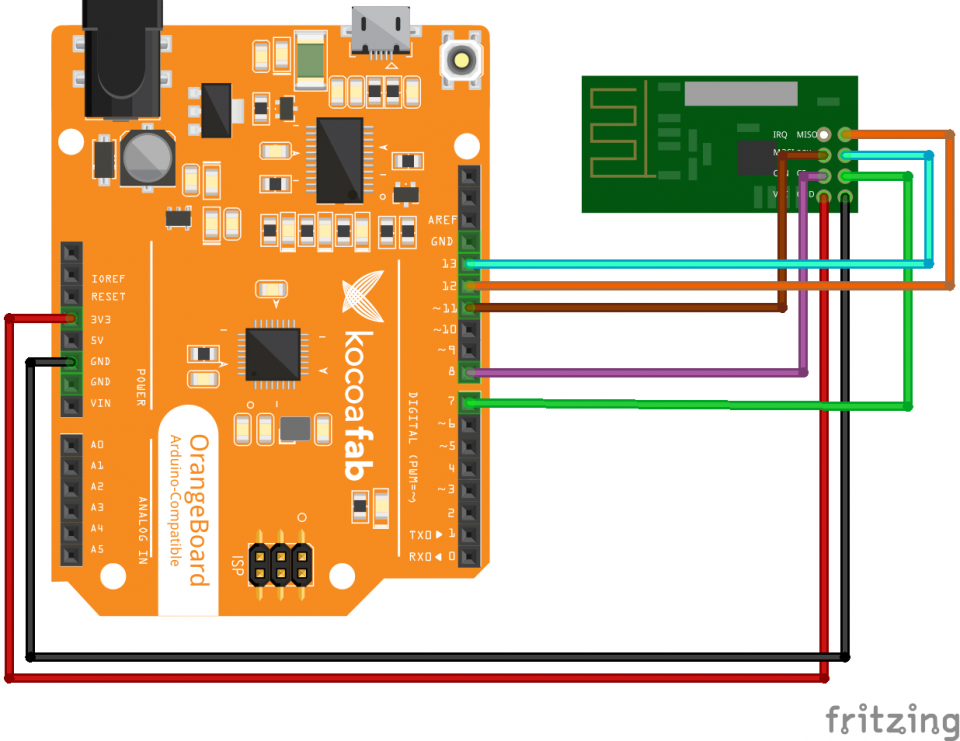
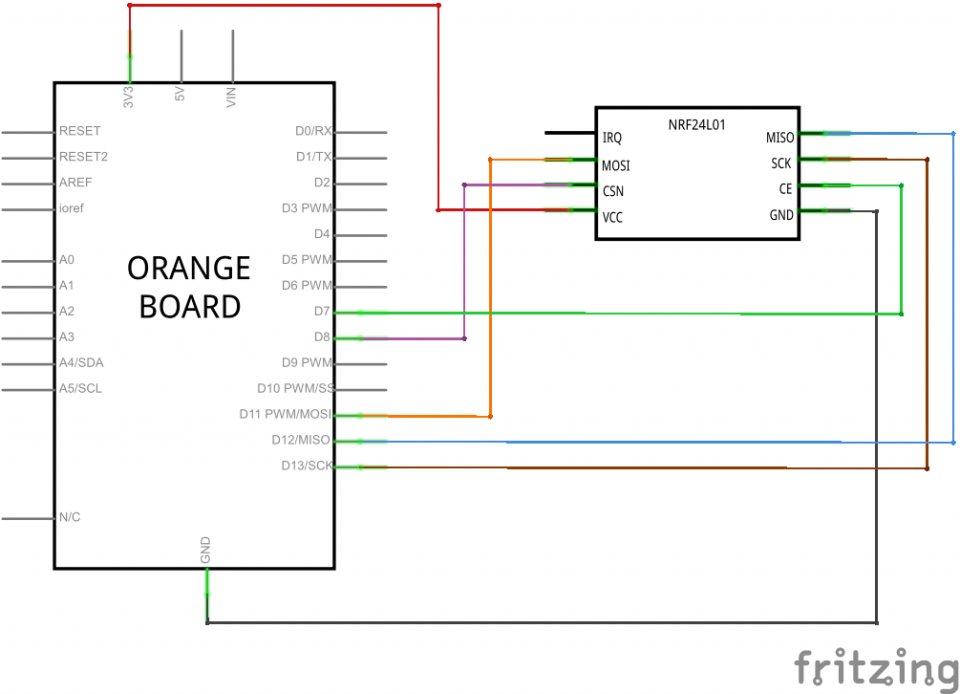
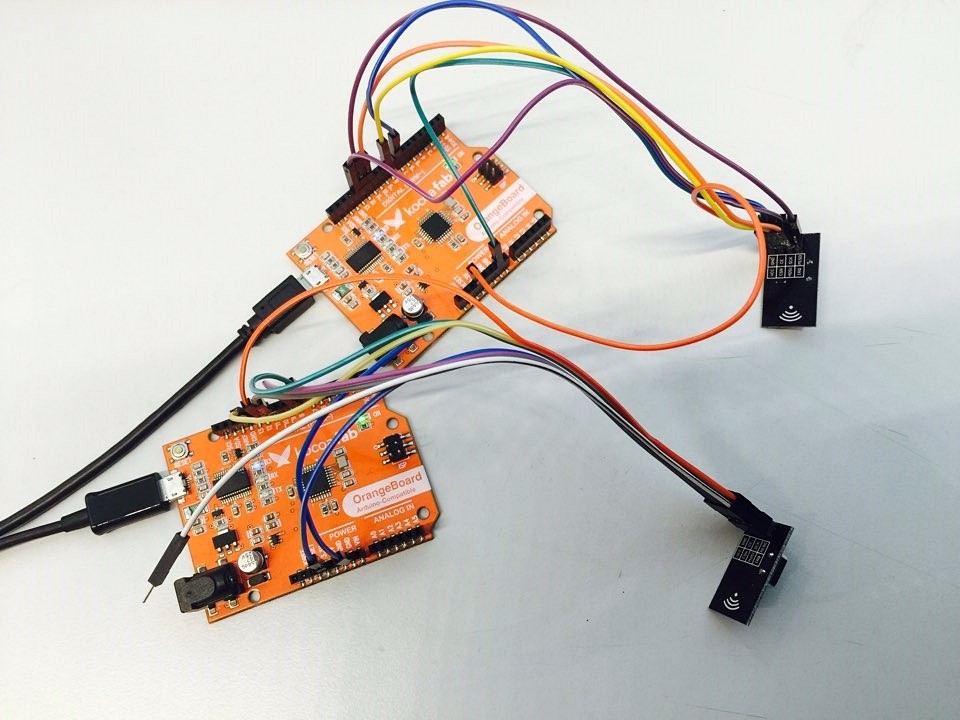
핀 연결 표
| IRQ | 연결없음 | MISO | D12 |
| MOSI | D11 | SCK | D13 |
| CSN | D8 | CE | D7 |
| VCC | 3.3V | GND | GND |
※ 전류는 5V가 아닌 3.3V에 연결해주셔야 합니다. 5V연결할 경우 모듈이 망가질 수 있으니 주의 하세요!
연결은 SPI통신으로 MISO핀과 MOSI핀을 사용합니다. 그리고 CSN핀과 CE핀은 소스코드상에서 변경가능합니다.
/*
* Getting Started example sketch for nRF24L01+ radios
* This is a very basic example of how to send data from one node to another
* Updated: Dec 2014 by TMRh20
*/
#include <SPI.h>
#include "RF24.h"
// Set this radio as radio number 0 or 1
bool radioNumber = 0;
// Hardware configuration: Set up nRF24L01 radio on SPI bus plus pins 7 & 8
RF24 radio(7,8);
byte addresses[][6] = {"1Node","2Node"};
// Used to control whether this node is sending or receiving
bool role = 0;
void setup() {
Serial.begin(115200);
Serial.println(F("RF24/examples/GettingStarted"));
Serial.println(F("*** PRESS 'T' to begin transmitting to the other node"));
radio.begin();
// Set the PA Level low to prevent power supply related issues since this is a
// getting_started sketch, and the likelihood of close proximity of the devices. RF24_PA_MAX is default.
radio.setPALevel(RF24_PA_LOW);
// Open a writing and reading pipe on each radio, with opposite addresses
if (radioNumber) {
radio.openWritingPipe((uint64_t)addresses[1]);
radio.openReadingPipe(1,(uint64_t)addresses[0]);
} else {
radio.openWritingPipe((uint64_t)addresses[0]);
radio.openReadingPipe(1,(uint64_t)addresses[1]);
}
// Start the radio listening for data
radio.startListening();
}
void loop() {
// Ping Out Role
if (role == 1) {
// First, stop listening so we can talk.
radio.stopListening();
Serial.println(F("Now sending"));
// Take the time, and send it. This will block until complete
unsigned long time = micros();
if (!radio.write( &time, sizeof(unsigned long) )) {
Serial.println(F("failed"));
}
// Now, continue listening
radio.startListening();
// Set up a timeout period, get the current microseconds
unsigned long started_waiting_at = micros();
// Set up a variable to indicate if a response was received or not
boolean timeout = false;
// While nothing is received
while ( ! radio.available() ) {
// If waited longer than 200ms, indicate timeout and exit while loop
if (micros() - started_waiting_at > 200000 ) {
timeout = true;
break;
}
}
// Describe the results
if ( timeout ) {
Serial.println(F("Failed, response timed out."));
} else {
// Grab the response, compare, and send to debugging spew
unsigned long got_time;
radio.read( &got_time, sizeof(unsigned long) );
unsigned long time = micros();
// Spew it
Serial.print(F("Sent "));
Serial.print(time);
Serial.print(F(", Got response "));
Serial.print(got_time);
Serial.print(F(", Round-trip delay "));
Serial.print(time-got_time);
Serial.println(F(" microseconds"));
}
// Try again 1s later
delay(1000);
}
// Pong Back Role
if ( role == 0 ) {
// Variable for the received timestamp
unsigned long got_time;
if ( radio.available()) {
// While there is data ready
while (radio.available()) {
// Get the payload
radio.read( &got_time, sizeof(unsigned long) );
}
// First, stop listening so we can talk
radio.stopListening();
// Send the final one back.
radio.write( &got_time, sizeof(unsigned long) );
// Now, resume listening so we catch the next packets.
radio.startListening();
Serial.print(F("Sent response "));
Serial.println(got_time);
}
}
// Change Roles via Serial Commands
if ( Serial.available() ) {
char c = toupper(Serial.read());
if ( c == 'T' && role == 0 ) {
Serial.println(F("*** CHANGING TO TRANSMIT ROLE -- PRESS 'R' TO SWITCH BACK"));
// Become the primary transmitter (ping out)
role = 1;
} else {
if ( c == 'R' && role == 1 ) {
Serial.println(F("*** CHANGING TO RECEIVE ROLE -- PRESS 'T' TO SWITCH BACK"));
// Become the primary receiver (pong back)
role = 0;
radio.startListening();
}
}
}
}
nRF24L01모듈을 사용하기 위한 라이브러리는 여러가지가 있지만 이 글에서는 RF24라이브러리를 사용하여 설명하겠습니다.
nRF24L01모듈은 SPI통신을 사용하며 양방향통신을 지원합니다.
위 소스는 하나의 소스로 두 가지 아두이노의 모드를 조절할 수 있습니다.
하나의 아두이노는 Ping역할(신호는 보내고 Pong의 응답을 받는 역할)을 하고 다른 하나의 아두이노는 Pong역할(Ping에서 보내는 신호를 받고 응답하는 역할)을 합니다. PingPong 즉 탁구와 같이 한쪽에서 신호를 보내면 다른 한쪽은 쳐내는 역할을 반복적으로 수행합니다.
위 역할을 정하기 위해서는 소스 상단의 아래 코드를 각 역할에 따라 0과 1로 변경해주셔야 합니다.(Transmit역할과 Receive역할은 시리얼 모니터에서 변경가능합니다.)
/****************** User Config ***************************/
/*** Set this radio as radio number 0 or 1 ***/
bool radioNumber = 0;
위 하드웨어making부분에서 CSN핀과 CE핀은 코드내에서 조정이 가능하다 했었는데 아래 코드에서 변경이 가능합니다. Default값으로 설정된 값은 7번핀과 8번핀입니다.
/* Hardware configuration: Set up nRF24L01 radio on SPI bus plus pins 7 & 8 */
RF24 radio(7,8);
/**********************************************************/
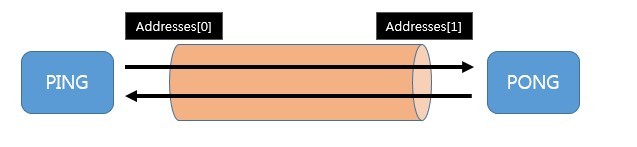
또 위 코드에서는 파이프통신을 사용합니다.
파이프 통신이랑 통신 방법이 슈퍼마리오에 나오는 들어가고 나오는 파이프와 같다하여 붙여진 이름입니다.
파이프의 각 입구마다 주소를 정해놓고 보내는 쪽과 받는쪽에서는 그 주소를 통해 통신하게 됩니다.
아래의 그림을 들어 예를 들면 PING은 Addressed[0]에서 Addresses[1]로 보내게 되면 Addresses[1]에 있는 PONG에게로 데이터가 전달됩니다.
반대로 Addresses[1]에서 Addresses[0]으로 데이터를 보내면 PING은 PING으로 데이터를 전송하게 됩니다.
nRF24L01모듈에서는 이러한 파이프를 6개까지 생성하여 하나의 RX와 최대 6개의 TX가 하나의 채널에서 통신이 가능합니다.
nRF24L01모듈은 또 양방향통신을 지원한다고는 하지만 Half duplex통신을 지원합니다.
Half duplex란 양방향통신 중 하나의 방법으로 한 사람이 데이터를 전송할 때 다른 한사람은 듣고만 있어야하는 불완전한 통신방법입니다.
실생활에서는 군대에서 사용하는 무전기를 생각하시면 됩니다.
Half duplex로 인해 위 소스에서는 데이터를 보낼 때 아래 코드와 같이 stopListening()이 선행되는것을 볼 수 있습니다. 데이터를 읽는 것을 계속한다면 데이터를 보낼 수 없기 때문에 데이터의 수신을 중단한다음 데이터를 전송하고 그 다음 다시 수신을 시작하게 됩니다.
radio.stopListening(); // First, stop listening so we can talk
radio.write( &got_time, sizeof(unsigned long) ); // Send the final one back.
radio.startListening();

kocoafabeditor 
항상 진취적이고, 새로운 것을 추구하는 코코아팹 에디터입니다!
 nRF24L01, 아두이노, 오렌지보드
nRF24L01, 아두이노, 오렌지보드





