
조이스틱센서쉴드 x 엔트리-진동 모터-드럼 만들기
2016-04-18 17:18:10
개요
서보 모터란 특정 위치로 이동하거나, 특정한 수치만큼 가동시킬 때, 모터로부터 피드백을 통해 정확하게 제어할 수 있는 구조를 가지고 있는 모터입니다.
우리가 자주 사용하는 서보 모터의 경우 0도에서 180도까지 각도 제어가 가능하며, 손 쉽게 사용할 수 있다는 특징이 있어 많은 사람들이 사용하는 부품 중 하나이며, 로봇의 관절, 장난감, 가전 제품 등에 광범위하게 사용되고 있습니다.
서보 모터는 DC 모터와 기어 박스 그리고 제어 회로로 구성되어 있으며, 제어 회로에는 가변 저항이 포함되어 있습니다.
DC 모터와 기어 박스가 회전하면서, 기어 박스에 부착된 다이얼 형 가변 저항도 같이 회전하게 됩니다. 회전에 따라 가변 저항의 저항 값이 달라지기 때문에 각도 제어가 가능한 것 입니다.
서보 모터에 대한 자세한 설명과 사용법은 아래 링크에 자세히 설명되어 있습니다.
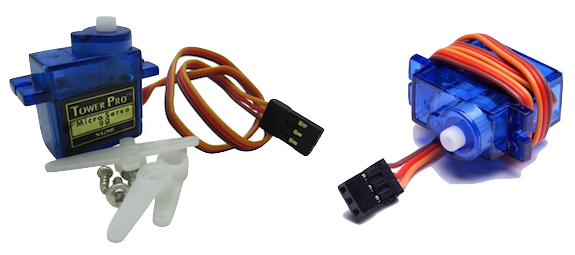
<SG-90 서보 모터>
SG-90은 비교적 가격이 저렴한 서보 모터의 종류 중 하나이며, 많이 보급된 서보 모터이기도 합니다.
이번 튜토리얼에서는 0도부터 180도까지 각도 제어가 가능한 서보 모터를 무한 회전 서보 모터(기어 박스 모터)로 개조하는 방법에 대해서 살펴보도록 하겠습니다.

<무한 회전 서보 모터>
부품 목록
| NO | 부품명 | 수량 | 상세설명 |
| 1 | 오렌지보드 | 1 | Arduino UNO |
| 2 | 서보 모터 | 1 | SG-90 |
| 3 | 2.0K 저항 | 2 | 또는 2.0K와 근접한 저항 |
| 부품명 | 오렌지보드 | 서보모터 | 저항 |
| 파트 |  |
 |
 |
하드웨어 making
소프트웨어 coding
/*
제목 : 무한 회전 서보 모터 만들기.
설명 : 0~180도까지 제어가 가능한 서보 모터를 무한 회전 서보 모터로 개조하기.
*/
#include <Servo.h>
// 서보 모터 객체를 선언합니다.
Servo mysevo;
void setup() {
// 서보 모터를 9번에 연결합니다.
myservo.attach(9);
}
void loop() {
// 서보 모터의 각도를 90도로 변경합니다.
myservo.write(90);
}
개조 방법
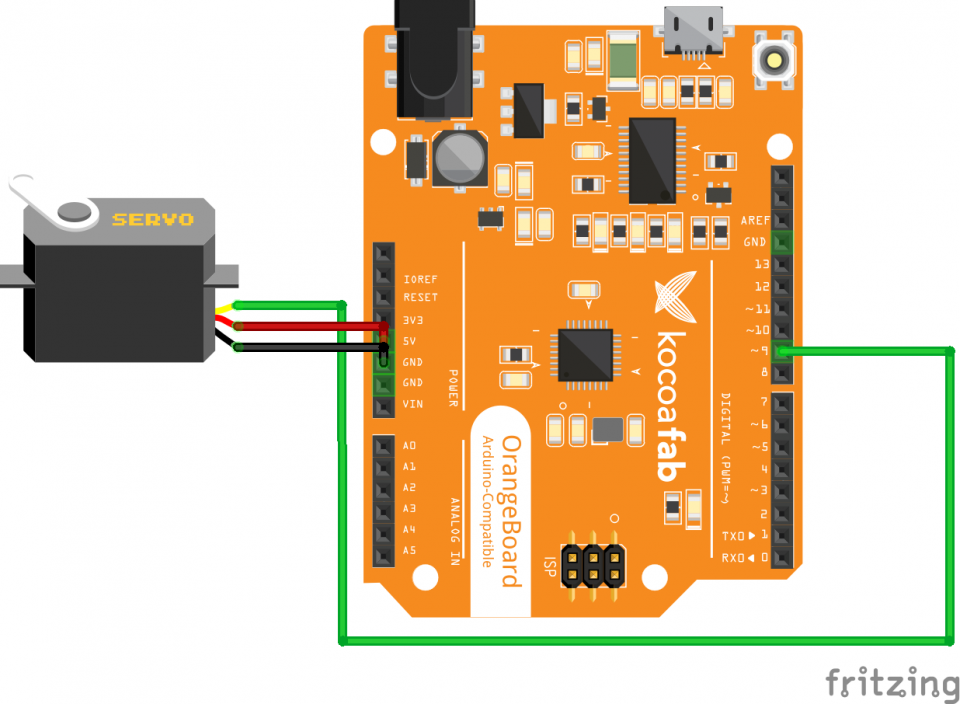
1. 서보 모터의 각도를 90도 맞춰줍니다.
아래 그림처럼 서보 모터를 오렌지보드에 연결해 준 후 소스 코드를 업로드시켜 서보 모터의 각도를 90도로 셋팅해줍니다.
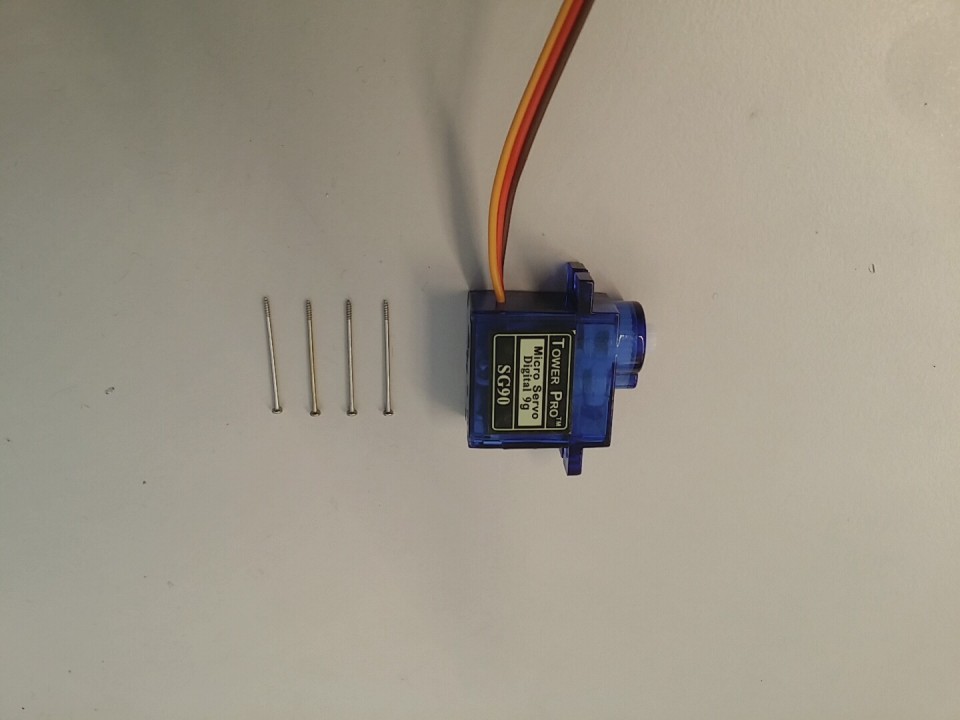
2. 준비물을 준비합니다.
서보 모터 개조를 위해서는 납땜을 진행합니다.
납땜에 사용되는 준비물들과 서보 모터, 저항, 드라이버와 컷팅기를 준비합니다.

3. 서보 모터 분해하기
드라이버를 사용해 서보 모터 밑면에 4개의 볼트를 제거해줍니다.
4. 서보 모터 덮개 제거하기
sg-90은 총 2개의 덮개가 존재합니다.
상단부 덮개와 하단부 덮개로 나눠지며, 두 덮개 모두 개봉이 가능합니다.
첫 번째로 하단부 덮개를 개봉해줍니다.
sg-90의 하단 덮개를 제거한 모습은 위와 같습니다.
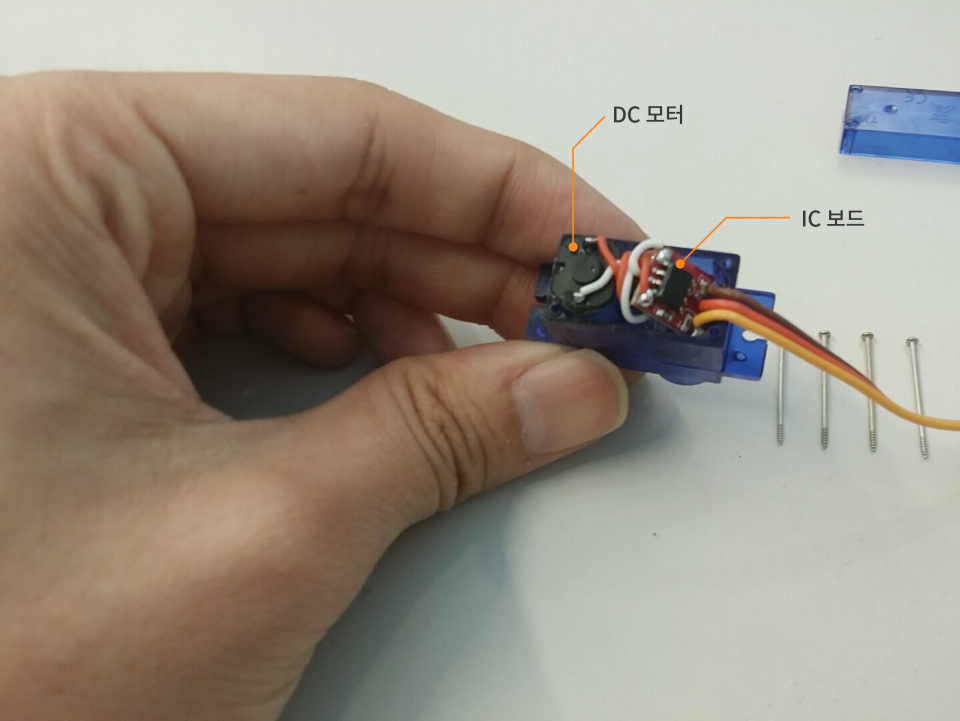
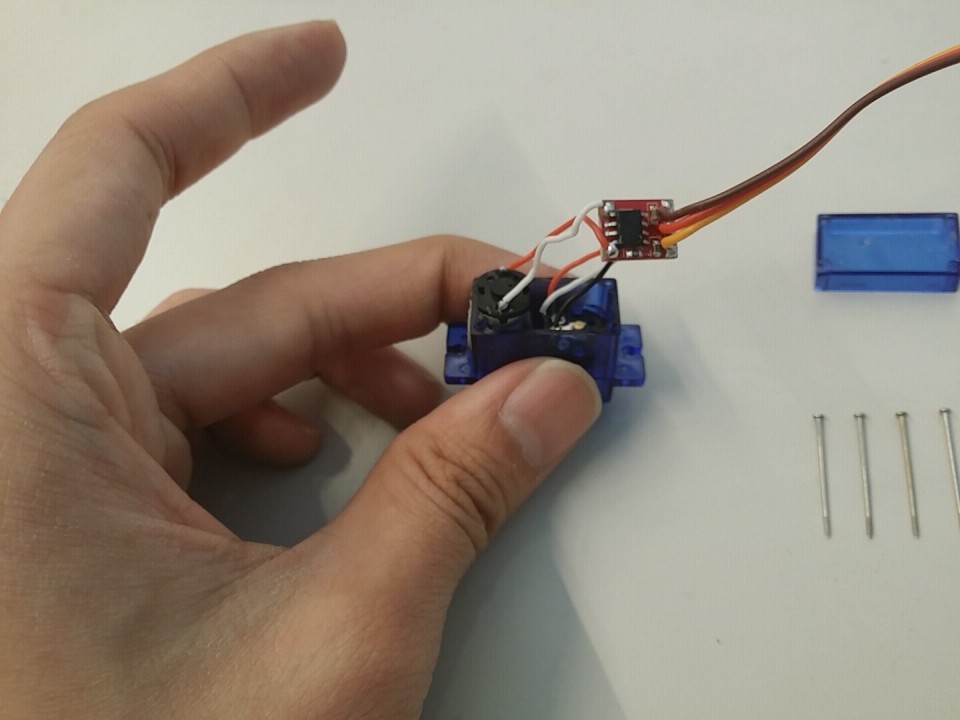
덮개를 개봉하면 DC 모터와 IC 보드를 볼 수 있습니다.
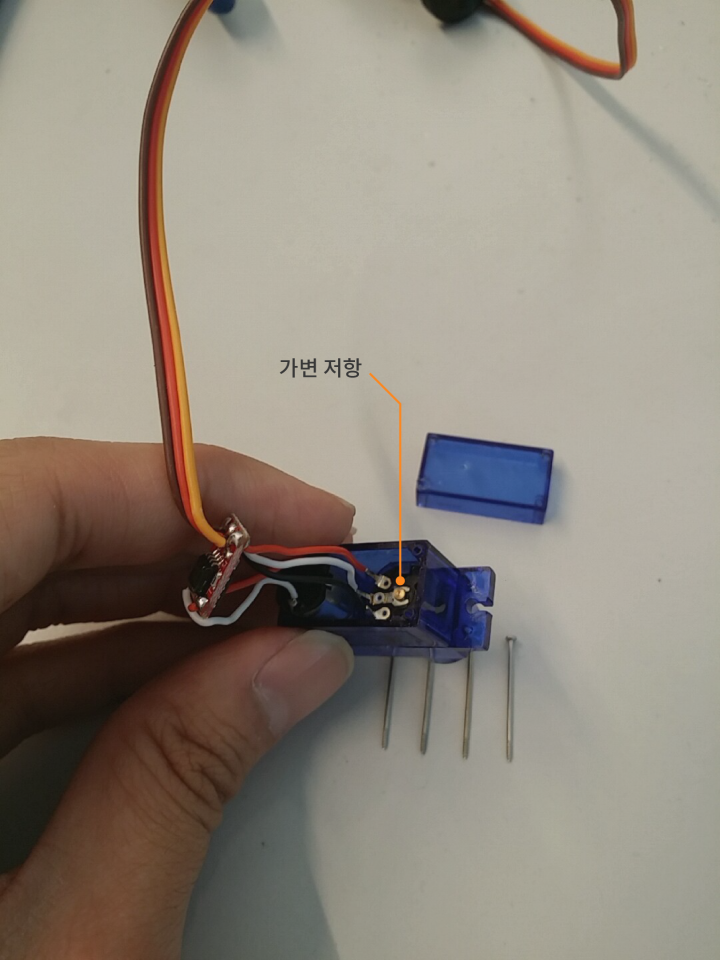
IC 보드를 들어내면 기어 박스와 맞물리는 부분에 가변 저항이 부착되어 있습니다.
5. 가변 저항과 연결된 선 제거하기
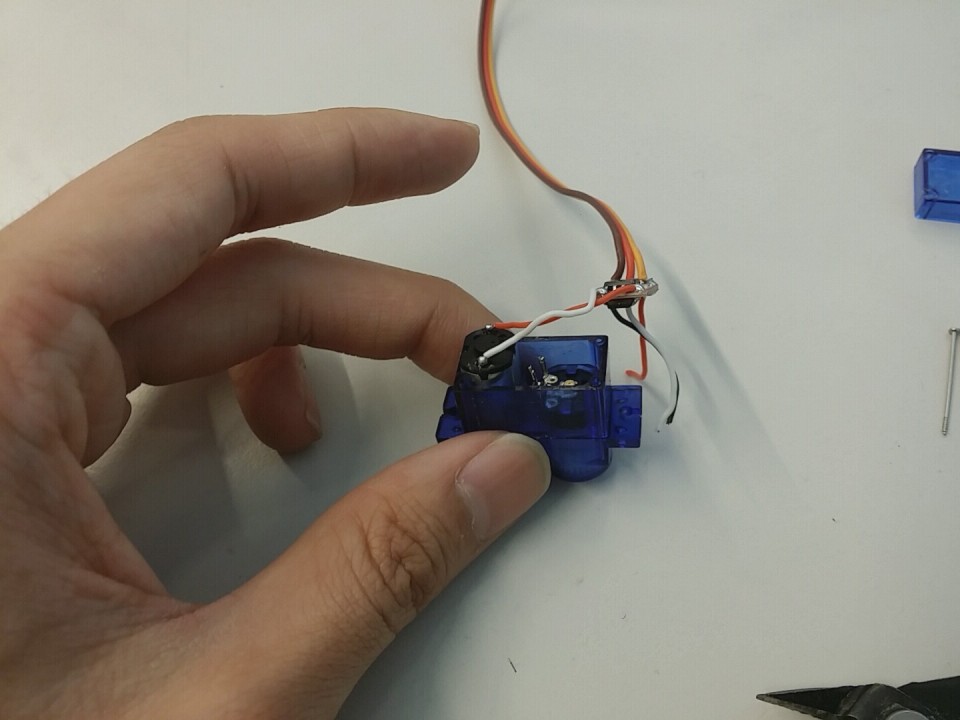
가변 저항과 연결된 3개의 선(빨간색, 검은색, 하얀색)을 컷팅기를 통해 제거해준 후 IC 보드에 연결된 3개의 선도 제거해줍니다.

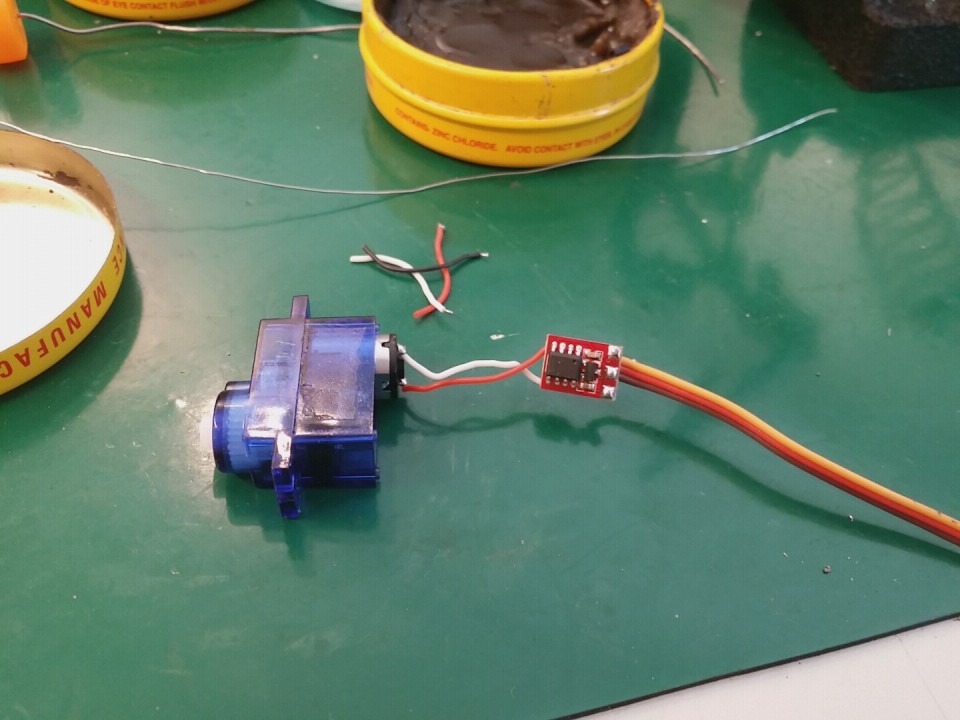
6. 선이 제거된 IC 보드에 저항 달아주기
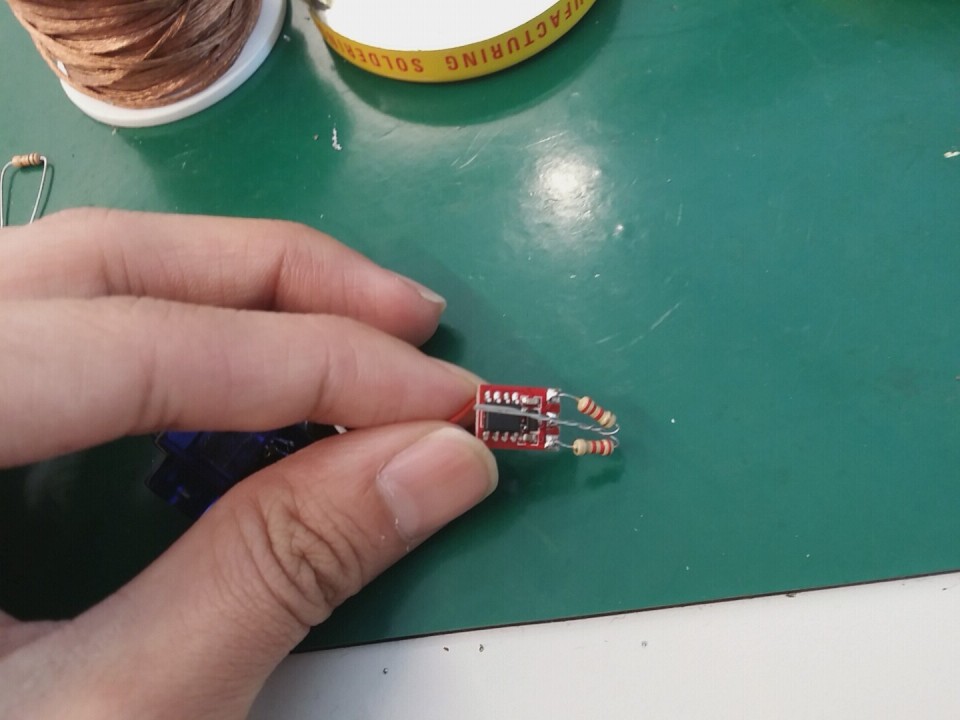
가변 저항과 연결되었던 IC 보드 납땜 부분에 저항을 달아줍니다.
저항을 달아주는 방법은 아래와 같습니다.
- 저항의 한 쪽 다리를 짧게 잘라줍니다.
- 가변 저항과 연결 되었던 3곳의 왼쪽과 오른쪽에 저항을 하나씩 납땜해줍니다.
- 납땜을 하지 않은 저항의 나머지 다리를 서로 꼬와줍니다.
- 꼬운 다리를 IC의 가운데에 납땜해줍니다.


이 모든 과정을 완료한 후에 sg-90의 하단 덮개를 닫아줍니다.
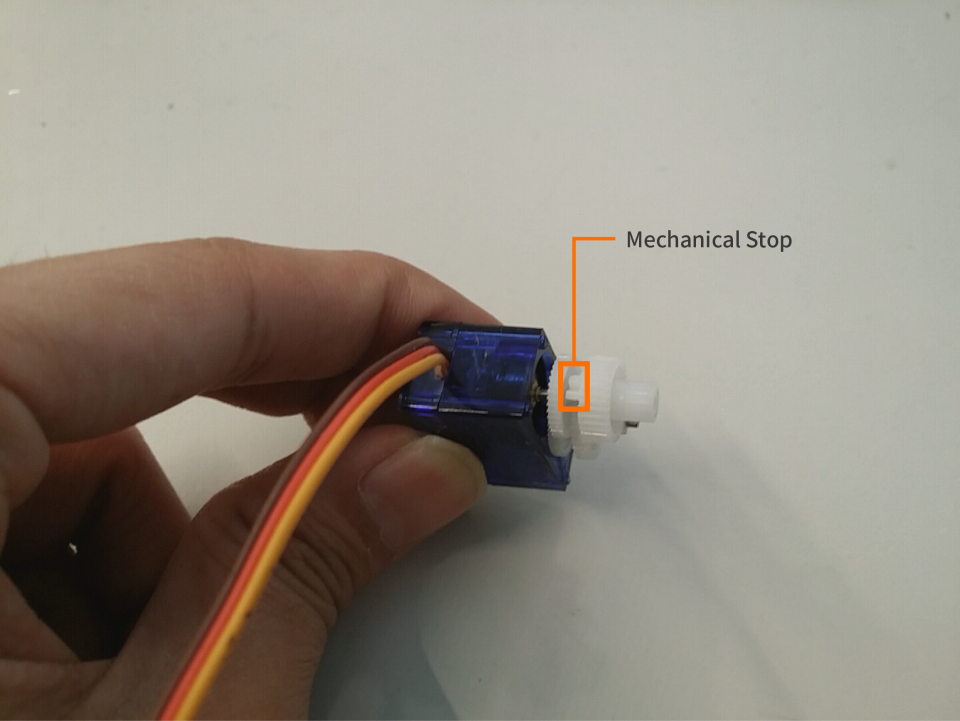
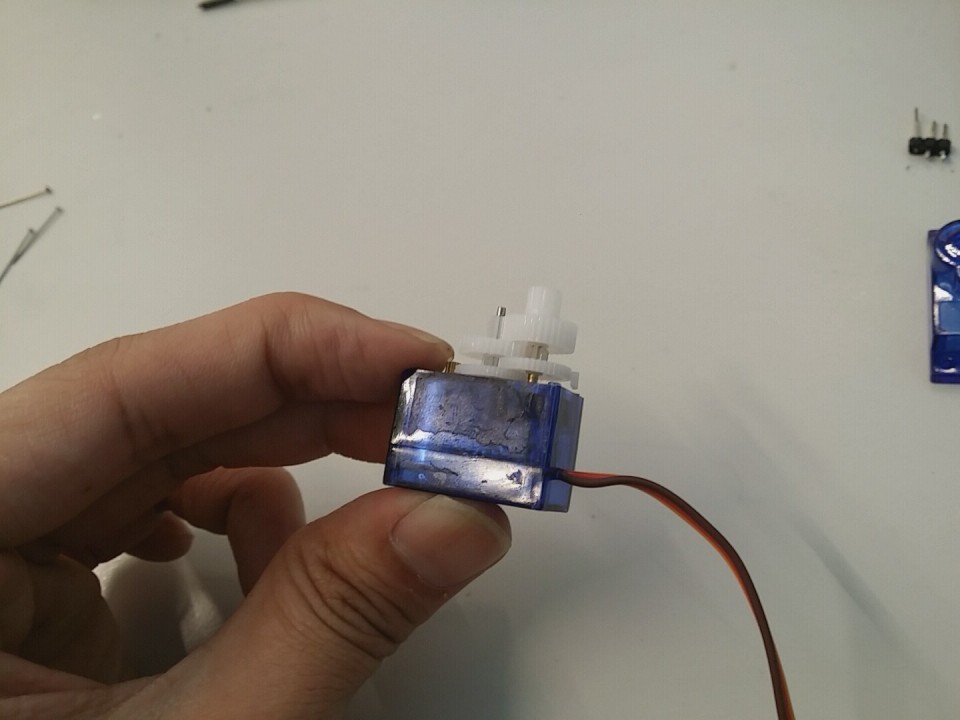
7. 서보 모터의 상단 덮개를 개봉한 후 mechanical stop 제거하기.
서보 모터의 상단 덮개를 제거한 후 기어 박스의 mechanical stop을 제거할 차례입니다.
아래 사진에서 표시된 부분이 기어의 mechanical stop 부분입니다.
mechanical stop은 서보 모터를 0도에서 180도까지의 회전 범위를 기구적으로 제한하는 역할을 합니다.
컷팅기를 이용하여 mechanical stop을 제거합니다.
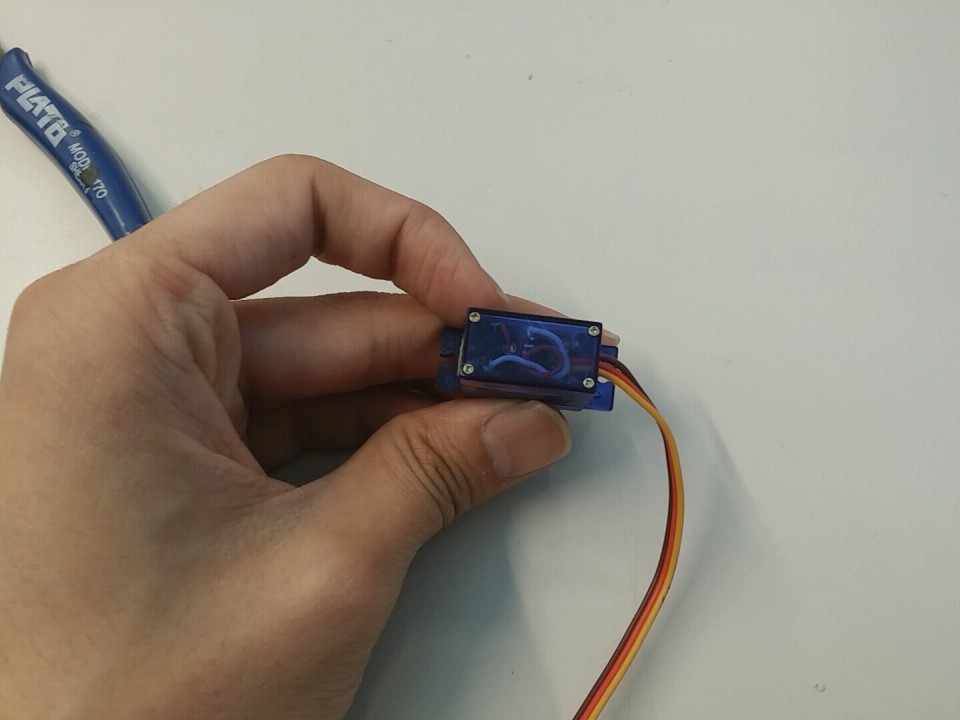
8. 상단 덮개 결합 후 드라이버로 결속하기
기어 박스의 mechanical stop 부분이 제거되었다면, 마지막으로 상단의 덮개를 닫아준 후 하단에 4개의 볼트를 다시 결속하여 줍니다.
작동 영상
무한 회전 서보 모터로의 개조가 완료되었습니다.
작동 방법은 기존의 Servo Library를 그대로 사용하여 제어하면 됩니다.
필자의 경우 2.2K 저항을 사용하였고, 서보모터 객체.wirte(angle)에서 87~90사이의 anlge 값을 가질 때 모터가 정지하는 것을 확인하였습니다.
87~90 사이의 angle 값을 기준으로 0과 180에 가까운 값을 가질 때 모터의 회전 방향이 달라지게됩니다.
예를들어 87의 anlge 값이 모터가 정지하는 기준 값이라면, anlge 값이 0이라면 시계 방향으로 회전, 180이라면 반 시계 방향으로 회전하게 됩니다.





kocoafabeditor 
항상 진취적이고, 새로운 것을 추구하는 코코아팹 에디터입니다!
 서보 모터, 아두이노, 오렌지보드
서보 모터, 아두이노, 오렌지보드
