2014-08-08 09:17:26

로터리 인코더는 전기모터나 엔진의 회전각도 또는 회전속도를 측정할 때 사용되는 대표적인 센서입니다.
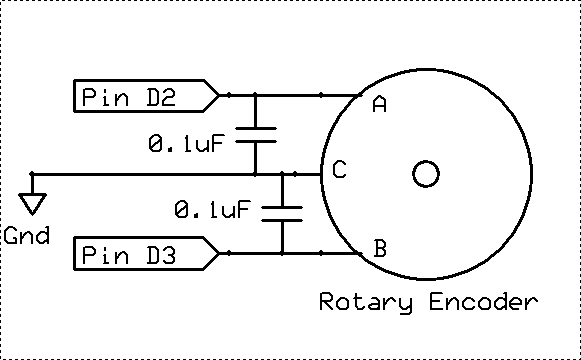
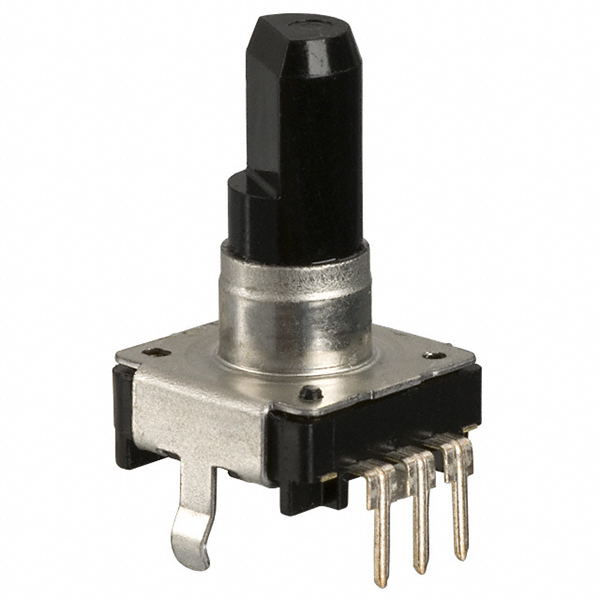
사진 : 로터리 인코더의 내부 회로도
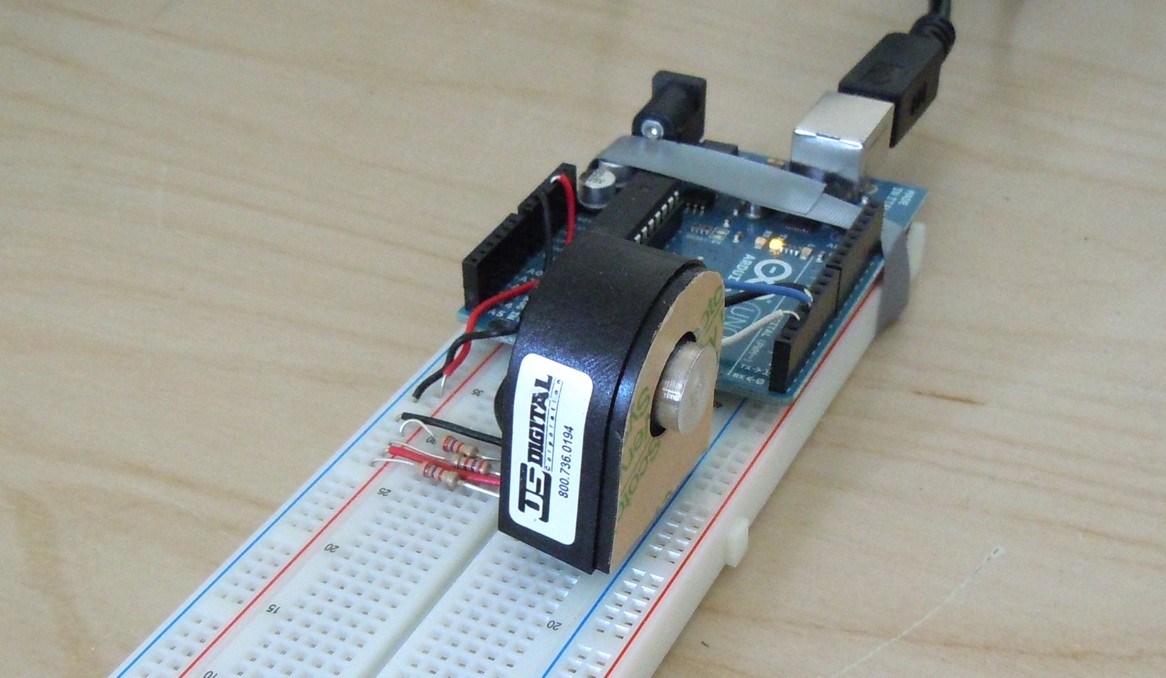
그럼 이 로터리 인코더가 어디에 적용되고 있는지 알아 봅시다.

출처 : 로터리 엔코더 키패드 - ponoko.com
푸시버튼을 내장하고 있는 로터러 엔코더를 이용하여 다양한 기계,전자 장비의 회전식 컨트롤러로 사용되거나
| NO | 부품명 | 수량 | 상세설명 |
| 1 | 아두이노 | 1 | 레오나르도 보드 |
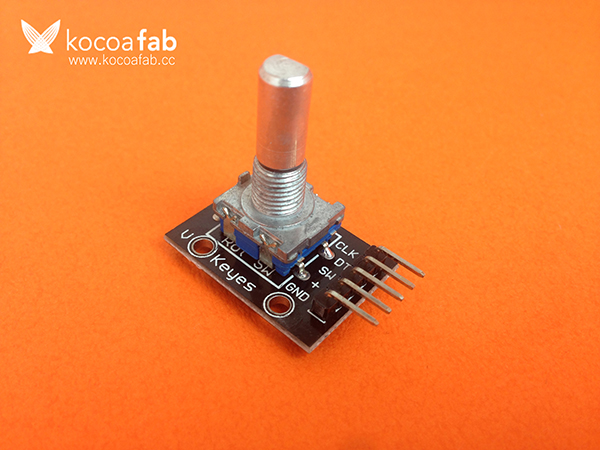
| 2 | 로터리 인코더 모듈 (푸시버튼 내장형) | 1 | 로터리 인코더 |
| 3 | 브레드보드 | 1 | 브레드보드 |
| 4 | 220Ω 저항 | 3 | 저항 |
| 5 | 점퍼 케이블 | 9 | 점퍼 케이블 |
| 6 | LED | 3 | 빨강:1 노랑:1 초록:1 |
| 부품명 | 아두이노 우노 R3 (오렌지보드) | 220Ω 저항 | 브레드보드 | 점퍼케이블 | Red LED |
| 파트 |  x1 x1 |
 x3 x3 |
 x1 x1 |
 x9 x9 |
 x1 x1 |
| 부품명 | Yellow LED | Green LED | 로터리 인코더 |
| 파트 |  x1 x1 |
 x1 x1 |
 x1 x1 |
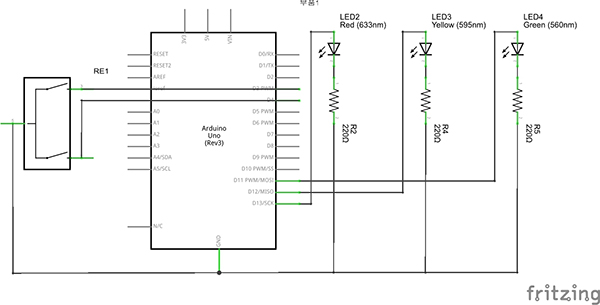
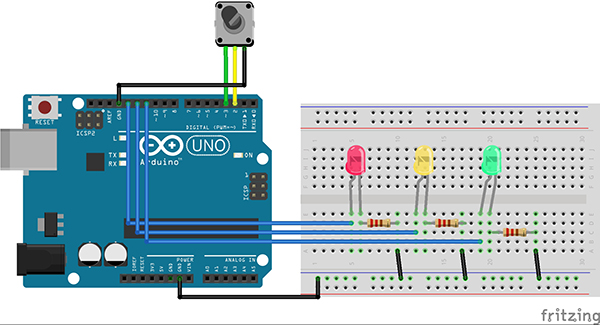
| 센서 핀 | 아두이노 핀 |
| GND | GND |
| + | 5V |
| SW(푸시버튼) | D2 |
| DT(pinA) | D3 |
| CLK(pinB) | D4 |
// 출처 : 33가지 프로젝트로 배우는 아두이노
// 13번핀에 빨간색 LED를 연결합니다.
int redPin = 13;
// 12번핀에 노란색 LED를 연결합니다.
int yellowPin = 12;
// 11번핀에 초록색 LED를 연결합니다.
int greenPin = 11;
// 로터리 엔코더의 aPin을 4번핀에 연결합니다.
int aPin = 4;
// 로터리 엔코더의 bPIn을 3번핀에 연결합니다.
int bPin = 3;
// 로터리 엔코더의 푸시버튼을 2번핀에 연결합니다.
int buttonPin = 2;
// 현재 상태를 저장합니다.
int state = 0;
// 초록색이나 빨간색일 때 불이 들어오는 시간을 설정합니다.
int longPeriod = 5000;
// 신호가 바뀔때의 시간을 설정합니다.
int shortPeriod = 700;
int targetCount = shortPeriod;
int count = 0;
void setup() {
pinMode(aPin, INPUT_PULLUP);
pinMode(bPin, INPUT_PULLUP);
pinMode(buttonPin, INPUT_PULLUP);
pinMode(redPin, OUTPUT);
pinMode(yellowPin, OUTPUT);
pinMode(greenPin, OUTPUT);
}
void loop() {
count++;
// 푸시버튼이 LOW일때
if (digitalRead(buttonPin) == LOW) {
// 모든 LED를 켭니다.
setLights(HIGH, HIGH, HIGH);
}
else {
int change = getEncoderTurn();
int newPeriod = longPeriod + (change * 1000);
if (newPeriod >= 1000 && newPeriod <= 10000) {
longPeriod = newPeriod;
}
if (count > targetCount) {
//현재상태를 저장합니다.
setState();
count = 0;
}
}
delay(1);
}
int getEncoderTurn() {
// -1,0,+1의 값중 하나를 반환합니다.
static int oldA = LOW;
static int oldB = LOW;
int result = 0;
int newA = digitalRead(aPin);
int newB = digitalRead(bPin);
if (newA != oldA || newB != oldB) {
// 바뀐 값이 있을 때
if (oldA == LOW && newA == HIGH) {
result = -(oldB * 2 - 1);
}
}
oldA = newA;
oldB = newB;
return result;
}
int setState() {
if (state == 0) {
setLights(HIGH, LOW, LOW);
targetCount = longPeriod;
state = 1;
}
else if (state == 1) {
setLights(HIGH, HIGH, LOW);
targetCount = shortPeriod;
state = 2;
}
else if (state == 2) {
setLights(LOW, LOW, HIGH);
targetCount = longPeriod;
state = 3;
}
else if (state == 3) {
setLights(LOW, HIGH, LOW);
targetCount = shortPeriod;
state = 0;
}
}
void setLights(int red, int yellow, int green) {
digitalWrite(redPin, red);
digitalWrite(yellowPin, yellow);
digitalWrite(greenPin, green);
}
// 초록색이나 빨간색일 때 불이 들어오는 시간을 설정합니다.
int longPeriod = 5000;
// 신호가 바뀔때의 시간을 설정합니다.
int shortPeriod = 700;
shortPeriod 는 스케치 중간에 바뀌지 않고, 신호등의 색을 바꿀 때 적용됩니다.
longPeriod 는 신호가 초록색이나 빨간색일경우 그 신호를 유지할 시간을 정하는 변수입니다.
따라서 로터리 엔코더를 회전하면 longPeriod의 값이 변화하게 됩니다.
int getEncoderTurn() {
// -1,0,+1의 값중 하나를 반환합니다.
static int oldA = LOW;
static int oldB = LOW;
int result = 0;
int newA = digitalRead(aPin);
int newB = digitalRead(bPin);
if (newA != oldA || newB != oldB) {
// 바뀐 값이 있을 때
if (oldA == LOW && newA == HIGH) {
result = -(oldB * 2 - 1);
}
}
oldA = newA;
oldB = newB;
return result;
}
로터리 엔코더를 다룰때 중요한 getEncoderTurn()함수 는 호출될 때 마다 A와 B의 현재 상태를 이전 상태와 비교하고,

kocoafabeditor 
항상 진취적이고, 새로운 것을 추구하는 코코아팹 에디터입니다!
 로터리 인코더, 아두이노
로터리 인코더, 아두이노





