
로봇팔 조립하기(20년도 5월 12일 이전 구매)
2020-05-13 13:37:32
★사전 셋팅(필수)★
★영점 각도 세팅(중요)★
- 사용하는 프로그램에 따라 하단의 링크를 통해 영점 각도 세팅 코드를 다운로드 한 후 오렌지보드에 업로드합니다.
- 스케치 : '90_degree_set.ino'(클릭해서 다운로드)
- 엠블록 : 'Set_degree_90.mblock'(클릭해서 다운로드)
* 서보모터의 초기 각도가 모두 다르게 셋팅되어 있는 관계로 로봇의 각 관절의 초기 각도를 동일하게 세팅하면서 조립하기 위한 작업입니다.
★로봇팔제작★
1. 로봇팔 밑판 준비하기
- 모터들의 90도 세팅을 해준 후에 확장보드와 오렌지보드를 분리해 줍니다.
- MDF 밑판 부품과 고무흡착판 3개를 준비합니다.
- 영상을 참고하여 각 홈에 고무흡착판을 끼워 고정해 줍니다.
* 앞부분에 화살표 모양 각인이 있는 면이 위를 향하도록 해주세요
2. 밑판에 기본 전자 부품들 결합하기
- 1단계에서 결합한 오렌지보드와 조이스틱 모듈 2개, M2 6mm 태핑 볼트 12개를 준비합니다.
- 드라이버를 이용하여 태핑 볼트로 MDF 밑판에 보드와 조이스틱 모듈을 결합합니다.
3. 기초 지지대 결합하기
- 확장보드를 오렌지보드에 다시 결합해 줍니다.
- M3 6mm 볼트 4개와 M3 20mm 지지대 볼트 4개를 준비합니다.
- 지지대 볼트가 윗면을 향하도록 MDF 밑판에 볼트와 지지대 볼트를 결합합니다.
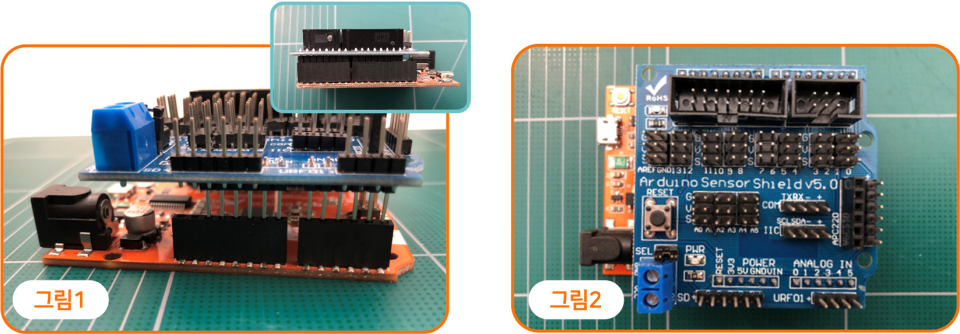
- 그림 1과 같이 확장보드의 핀을 오렌지보의 핀에 잘 정렬시켜 끼워줍니다.
- 제대로 결합이 완료되면 그림 2와 같습니다.
4. 배터리 연결
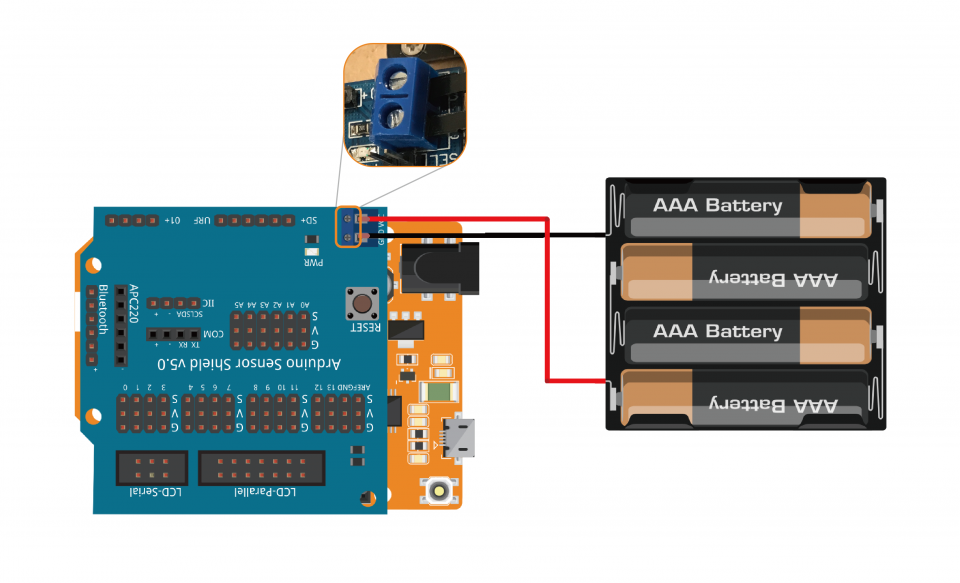
- 배터리홀더에 배터리를 끼워줍니다.
* 배터리를 끼울 때는 배터리의 홀더의 스위치가 OFF인 상태에서 끼워줍니다.
- 사진에서 표시된 부분의 볼트를 살짝 풀어 배터리 전선을 연결한 후 다시 조여줍니다.
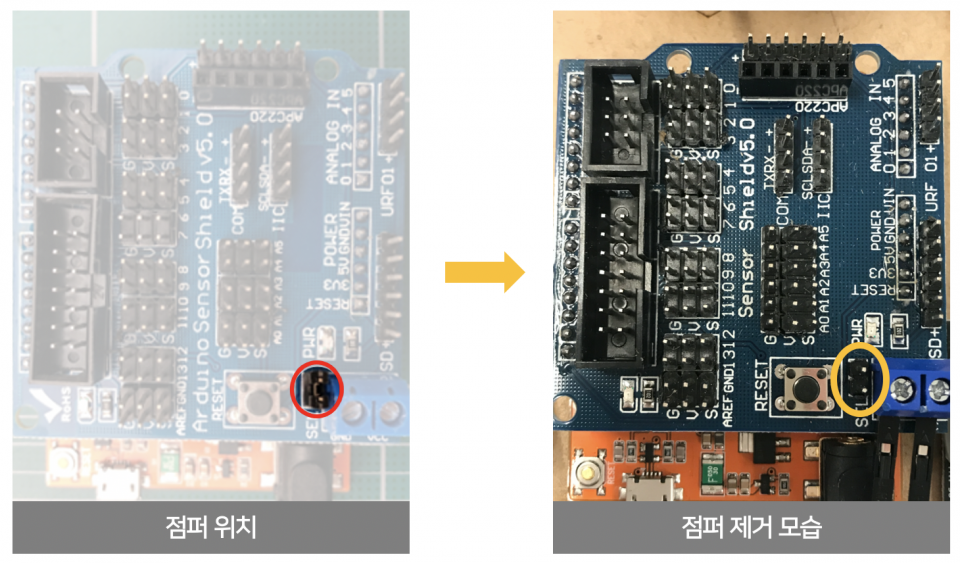
점퍼를 제거하면 서보모터는 배터리로부터 전력을 공급받게 됩니다. 따라서 배터리 스위치를 ON으로해야 서보모터를 동작시킬 수 있습니다.
- 점퍼 제거 후 배터리 홀더의 스위치를 ON으로 설정합니다.
5. 하부 회전판에 모터 고정하기
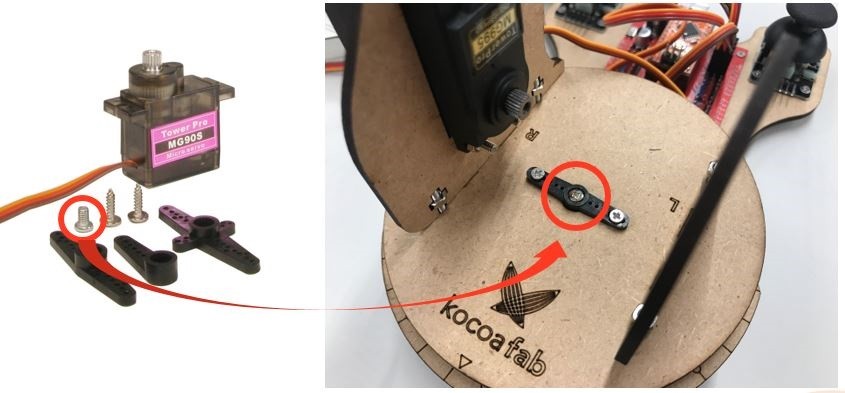
- MDF 밑판 부품과 MG90S(작은서보모터), M3 12mm 볼트 2개, M3 너트 2개를 준비합니다.
- MDF 밑판 아랫면에서 모터에 덮개 부품을 끼워준 후 볼트와 너트를 이용해 단단히 고정합니다.
* MDF 밑판과 MDF 모터 덮개에 [O 각인]이 되어 있는 방향에 서보 모터의 원형 몸치가 향하도록 결합합니다
6. 하부 회전판을 지지대에 고정하기
* 영상에서는 확장보드에 배터리홀더가 연결되어 있지 않지만, 배터리홀더의 전원을 켜고 확장보드에 배터리홀더를 연결한 상태에서 조립합니다.
- 이전 단계에서 조립한 부품들과 M3 6mm 지지대 너트 4개를 준비합니다.
- 영상과 같이 하부 회전판을 지지대에 끼운 후 지지대너트를 이용해 판을 고정해줍니다.
- 좌우 회전용 모터를 확장보드에 연결해 줍니다. (D8번 핀)
7. 어깨 관절 모터 결합 하기
- MDF 큰 모터 고정판과 MG995(대형 서보모터), M3 12mm 볼트 4개, M3 너트 4개를 준비합니다.
- MDF 고정판에 서보모터를 영상과 같이 끼워준 후 볼트와 너트를 통해 고정합니다.
* [O 각인]이 되어 있는 방향에 서보 모터의 원형 몸치가 향하도록 결합합니다
8. 회전판과 어깨 관절 파츠 결합하기_1
- 전 단계에서 제작한 큰 서보모터 고정 부품과 M3 12mm 볼트 4개, M3 너트 4개를 준비합니다.
- 방향을 주의하며 [L 각인]와 [R 각인]을 맞춰 각 부품을 결합합니다.
- MDF의 홈에 너트를 넣은 후 볼트를 체결해 단단히 고정합니다.
* 너트를 넣을땐 반대편을 손가락으로 받쳐 너트가 뒤쪽으로 빠져나가지 않도록 해줍니다.
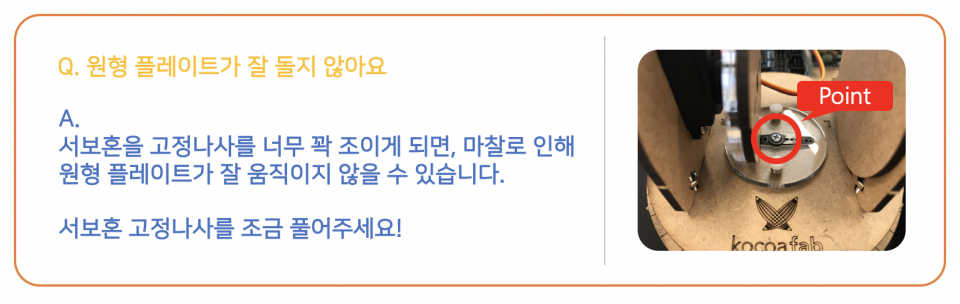
* 서보모터 부품에 포함되어 있는 볼트를 이용해 서보혼과 서보모터를 단단히 고정합니다.
9. 회전판과 어깨 관절 파츠 결합하기_2
- 중심 방향을 맞춰 (90도방향) 서보 혼 부분을 하단부의 서보모터 머리에 끼워줍니다.
- 모터를 확장보드에 연결해 줍니다. (D9번 핀)
10. 로봇팔 관절부 조립하기_1
<서보모터를 쉽게 끼우는 방법>
- MDF 하단 관절 부품(L각인)과 MG90S(소형 서보모터), M3 12mm 볼트 2개, M3 너트 2개를 준비합니다.
- MDF 부품에 서보모터를 영상과 같이 끼운후 MDF 모터 덮개를 씌운 후 볼트와 너트를 이용해 단단히 고정합니다.
* [O 각인]이 되어 있는 방향에 서보 모터의 원형 몸치가 향하도록 결합합니다.
11. 로봇팔 관절부 조립하기_2
- 이전 단계에서 제작한 로봇팔 MDF 관절 부품들, 리뱃볼트 1개를 준비합니다.
- 동영상을 참고해 로봇팔 부품들을 결합합니다.
- 모터를 확장보드에 연결해 줍니다. (D10번 핀)
* 관절부가 수직으로 위쪽 방향(90도 방향)을 향하도록 결합합니다.
12. 로봇팔 관절부 조립하기_3
- MDF 로봇팔 상단 관절 부품들과, MG90S(작은서보모터), M3 12mm 지지대 너트 2개, M3 6mm 볼트 4개를 준비합니다.
- MDF 부품의 홀에 볼트를 활용해 영상과 같이 지지대를 결합합니다.
- 서보모터를 MDF 상단 관절 부품들(L각인, R각인) 사이에 위치시킨 후 볼트를 활용해 로봇팔 부품을 고정합니다.
13. 로봇팔 관절부 조립하기_4
- 영상을 참고해 팔의 집게 부분을 조립합니다.
14. 로봇팔 관절부 조립하기_3
- 지금까지 조립해온 로봇팔 몸체와 로봇팔 상단 관절, 리뱃볼트 1개를 준비합니다.
- 동영상을 참고해 상단 관절부를 몸체와 결합해 줍니다.
- 모터의 케이블을 암-수 케이블을 이용해 연장 해준 후 확장보드에 연결해 줍니다. (D11번 핀)





kocoafab

