
풍뎅이 로봇 만들기(1. 제작하기)
2015-03-27 12:01:24
개요
풍뎅이 로봇(Beetle Bot)을 만들어 봅시다.
이번에 만드는 풍뎅이 로봇은 익스트럭티블즈(http://www.instructables.com/)에서 아이디어를 구했으며 아래 링크를 보고 만들었습니다.
How to Build a Robot - The BeetleBot - http://www.instructables.com/id/How-to-Build-a-Robot---The-BeetleBot/
사실 결론부터 말씀드리면 아직 완성은 못했습니다.;;

보고 쉬운 재료와 간단한 구성품으로 굴러가는 것을 보고 하루면 제작할 수 있겠거니 했지만 역시 만들어진 것을 보는것과 직접 만드는 것은 상당한 차이가 있었습니다.
(재료는 물론 나와있는 재료를 사용했습니다.)
일단은 이번 글에서는 현재까지의 진행상황과 어떤 제가 만든 풍뎅이 로봇이 어떤 문제점을 가지고 있는지 적어보겠습니다.
필요한 부품
| NO | 부품명 | 수량 | 상세 설명 |
| 1 | DC모터 | 2 | |
| 2 | 배터리 홀더 | 1 | AA x 2개 |
| 3 | 스위치 | 2 | SPDT스위치 |
| 4 | 강선 | 1묶음 | |
| 5 | 클립 | 3~5 |
|
| 부품 이름 | DC모터 | 배터리 홀더 | 스위치 | 강선 | 클립 |
| 부품 사진 |  |
 |
 |
 |
 |
이번 프로젝트에서는 아두이노를 사용하지 않습니다!
그렇기 때문에 코딩부분도 없으며 간단한 부품들을 사용해 제작이 가능합니다. 아두이노를 많이 다뤄본 보신 분들이라면 위의 부품들은 다들 가지고 계실거라 생각합니다.
원리
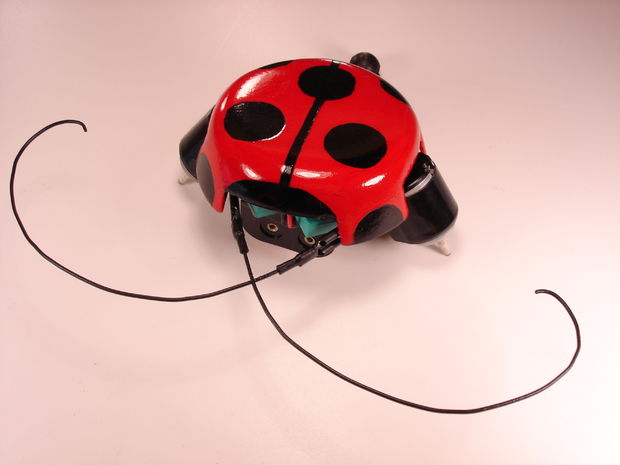
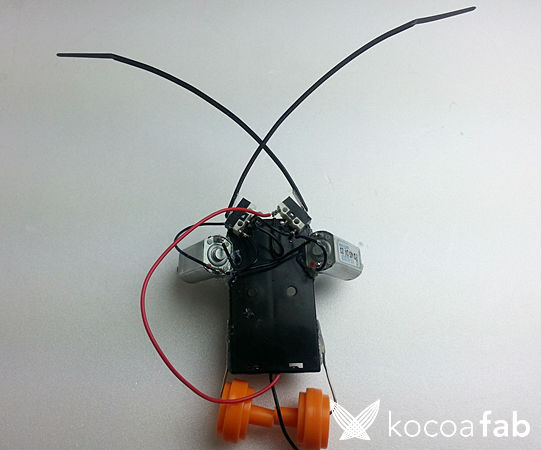
원리를 알기 전에 일단 풍뎅이로봇이 어떻게 생겼는지 알아야 원리를 알 수 있겠죠?
선이 어떻게 연결되 있는지는 보이지 않지만 그래도 간단히 각 부품이 어디에 위치해 있는지는 알 수 있습니다.
모터의 경우 바퀴의 역할을 하게 되며 지면과의 각도에 따라 풍뎅이 로봇의 속도가 결정됩니다.
SPDT스위치(이하 그냥 스위치)는 더듬이와 연결되어 방향을 제어하는 역할을 하게 됩니다.
일단 SPDT스위치를 설명하면 아래 GIF와 같이 스위치가 눌리게 되면 기본 COM핀(제일 오른쪽)와 연결되는 핀이 달라지는 스위치 입니다.
흔히 어릴때 초등학교에서 꼬마전구를 끄고 켜고 했을때의 스위치를 생각하면 그나마 쉬울거라 생각합니다.
모터와 스위치를 이용하여 스위치를 눌렀을 경우 모터를 제어하게 하는 회로도를 만들 수 있습니다.
아래와 같이 연결하게 되면 양쪽 스위치가 눌릴 때마다 모터가 각각 작동을 멈추게 됩니다.
이 회로도는 직접 손으로 짚어보시거나 연필로 그려가며 회로를 따라가보시기 바랍니다. :D
만드는 방법
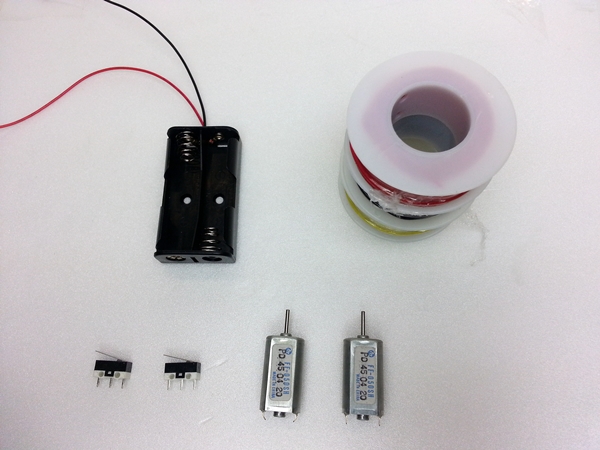
아래와 같은 부품을 준비합니다.
기본틀을 잡아줍니다. 글루건을 사용하면 쉽게 접착이 가능합니다.
모터 부분은 배터리 홀더의 모서리에 접착하기 때문에 글루건으로 특히 신경써서 붙어주어야 합니다.

클립을 준비합니다. 이 클립으로 뒷바퀴를 만들 축을 만듭니다.

뒷바퀴를 만들고 스위치에 더듬이를 달아줍니다. 저는 더듬이를 케이블타이를 통해 만들었습니다.
※선 연결 방법
1. 배터리 홀더에 다음과 같이 또다른 선을 납땜해 줍니다.(파란색 선)

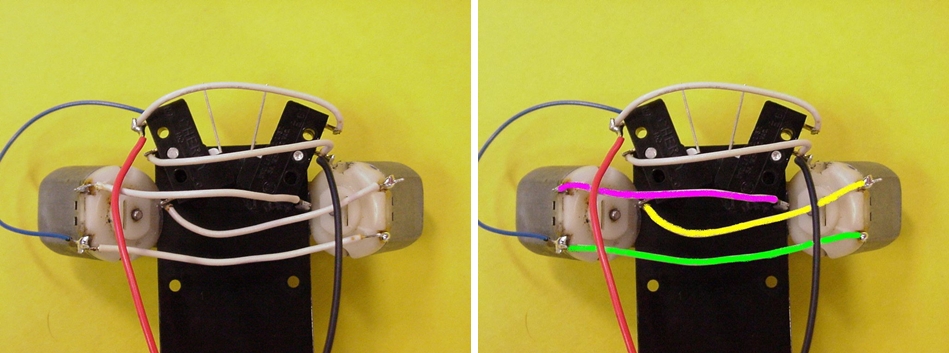
2. 스위치와 모터를 다음과 같은 방법으로 연결해줍니다.
이 연결은 위의 원리에서 모터와 스위치를 연결한 회로도와 같습니다.(서로 짚어보면서 비교해 보면 같은 회로도 임을 알 수 있습니다.)
문제점
저는 이대로 따라하면 될 줄 알았는데 몇가지 문제점이 있었습니다.
1. AA건전지 2개로 모터를 제대로 돌리지 못할 수 있다.(전압이 약하다.)
2. 더듬이의 탄성력이 작을 경우 방향을 제대로 틀질 못한다.(스위치가 눌려도 방향이 꺽이질 않는다)
3. 두 DC모터가 받는 힘이 일정하지 않아 서로 출력하는 힘이 달라 방향이 일직선으로 가질 못한다.(한 방향으로 쏠린다)
제작한 사람은 두개의 AA건건지로 상당한 출력을 이끌어 냈는데 막상 제가 돌리려니 허풍 좀 더 보내서 거의 달팽이가 기어가는 수준이었습니다.
또한 모터의 출력이 낮다 보니 더듬이가 탄성력을 제대로 받질 못해 벽을 만나면 그냥 충돌하여 제자리에서 헛돌기만 하였습니다.
원문에서는 더듬이를 클립을 통해 만들어서 저도 클립을 통해 더듬이를 만들어 봤지만 도저히 탄성력도 없고 뻣뻣해서 더듬이 역할로는 나름 불합격판정을 내리고
그보다는 탄성력이나 멋나는 케이블타이를 통해서 더듬이를 제작하였습니다. 그렇지만 별차이가 없습니다.... 오히려 너무 힘이 없어서 스위치가 안눌리는..........
한 방향으로 쏠리는 현상은 똑같이 모터에 전압을 공급해 주더라도 모터를 배터리 홀더에 부착할 때 각도가 다 다를 수 있고 받는 전압도 조금씩 차이가 있는지 계속 한 방향으로 움직입니다.
슬픕니다ㅠㅡㅠ
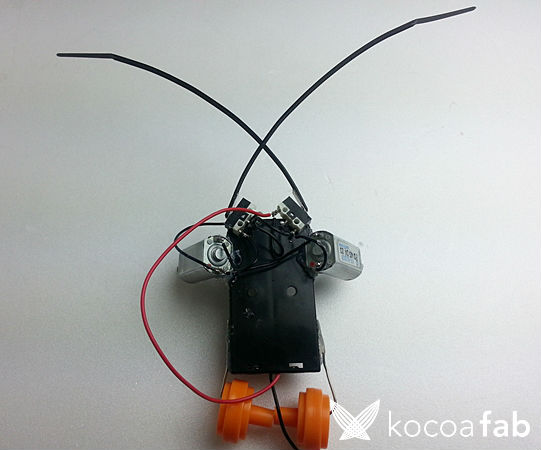
아래 동영상은 하루동안 직접 제작해보고 나온 결과물입니다.
그리고 영상보면 알지만 배터리 홀더의 -선을 빼도 잘 가길래 저는 잘되는 줄 알았더니 결국엔 선하나가 끊어지더니 문제가 생기더군요..
영상보면 그나마 힘없이 잘 굴러가던게 도저히 가질 않습니다.
그래서 일단 해결방안을 나름 생각 해 봤습니다.
1. 전압 문제 -> 배터리 홀더(AAx2개)를 하나 더 직렬로 장착
2. 더듬이 문제 -> 더듬이 교체 및 이 문제에 대해서는 더 생각해 봐야할 듯 합니다.
3. 한 방향 쏠림 문제 -> 사람인지라 정교하게 두 모터의 각도를 맞춰주기는 힘들기 때문에 굴러가는 바퀴를 만들어 바퀴크기로 해결해 보려 합니다.
아직 하루동안 제작해 본 풍뎅이 로봇이기 때문에 아직 개선 여지는 충분하다고 생각합니다.
다음 글을 올리게 되면 해결 방안에 따라 문제를 해결해 보고 올리도록 하겠습니다!
감사합니다^_____^





수박쨈
 풍뎅이 로봇, Beetle Bot, DC모터, SPDT스위치
풍뎅이 로봇, Beetle Bot, DC모터, SPDT스위치
