
풍뎅이 로봇 만들기(2. 보완하기)
2015-03-31 11:45:15
이번 글에서는 저번에 만든 Beetle Bot의 문제점을 보완해서 해결해보려 합니다!
링크 : 풍뎅이 로봇 만들기(1. 제작하기)
지난 글에서 문제점을 되집어 보면
1. AA건전지 2개로 모터를 제대로 돌리지 못할 수 있다.(전압이 약하다.)
2. 더듬이의 탄성력이 작을 경우 방향을 제대로 틀질 못한다.(스위치가 눌려도 방향이 꺽이질 않는다)
3. 두 DC모터가 받는 힘이 일정하지 않아 서로 출력하는 힘이 달라 방향이 일직선으로 가질 못한다.(한 방향으로 쏠린다)
였는데 일단 몇가지 문제는 해결한 듯 싶습니다.
1. 전압문제
단순히 전압이 딸려 이 문제는 배터리를 추가하지 않는 한 해결되지 않는 문제라고 생각했습니다.
그래서 AAx2개 배터리 홀더를 하나 더 달아서 6v로 돌려보기도 했지만(사진은 못찍었습니다.) 해결되지 않았습니다.
그래서 방황하더 차에 예전 어릴때 가지고 놀던 미니카가 생각났습니다.
미니카는 AA건전지 2개로도 정말 쌩쌩 돌아갔었는데 블랙모터, 골드모터, X모터(?!) 등 모터에 따라 속도가 천차 만별이었는데
모터 문제가 아닐까?
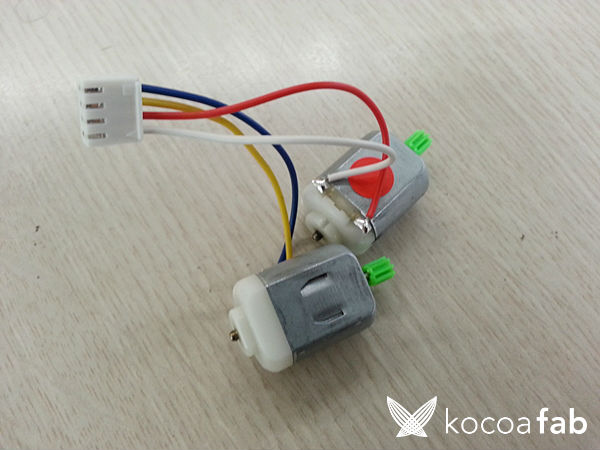
다행이 남은 DC모터들을 더 찾아봤고, 기존 다른 로봇에 달려있던 DC모터를 분해해서 사용해보기로 했습니다.
아래 사진은 이제 곧 분해될 DC모터 커플입니다.
작업대 고무바닥이 더럽지만 기존에 달려있던 DC모터 한 쌍을 떼버리는 사진입니다.
추가. 나중에 안 사실이지만, 확실히 모터에 따라 돌아가는 힘(RPM)의 차이가 심각하게 있었습니다.
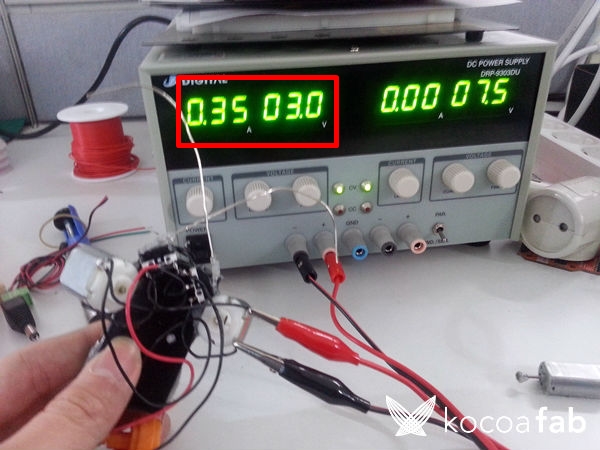
아래 사진은 파워 서플라이에서 확인한 두 모터의 차이 입니다.
기존에 사용했던 모터 입니다. 3v에서 10mA밖에 소모하지 못합니다.
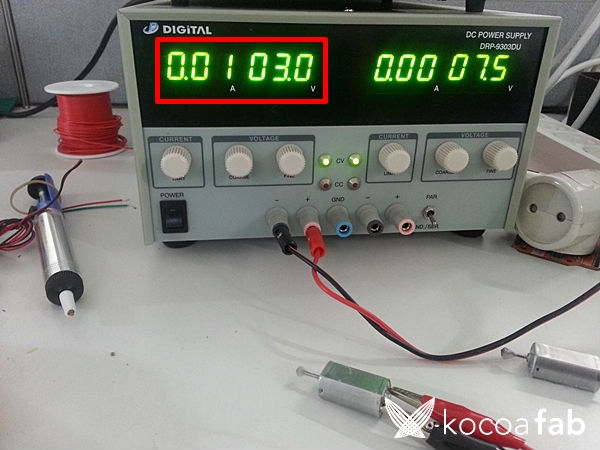
이번에 새로 단 모터입니다. 똑같은 3v에서 350mA를 소모합니다.
소모 전류가 확연히 다르니 속도부터가 확실히 달라졌음을 알 수 있었습니다.
모터를 교체함으로 AA건전지를 4개까지 사용해봤던 수고를 덜 수 있게 되었습니다.
2. 더듬이 문제
이 더듬이가 잘 눌리지 않아 방향을 틀지 못하는 문제는 1번 전압문제와 엉켜있었던 문제 입니다.
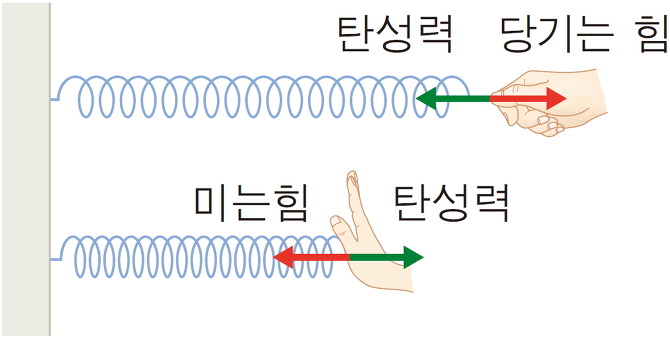
중학교, 고등학교 과학시간에 배웠던 뉴턴의 제 3법칙 작용, 반작용 법칙입니다.
벽에 주는 힘이 커야 벽이 나를 밀어내는 힘도 강해지는데
기존에 모터로는 벽을 미는 힘이 어림도 없으니 벽 또한 풍뎅이 로봇을 밀어내는 힘이 어림도 없었습니다.
이제 모터를 바꿨으니 더듬이 문제는 해결..... 이 아니었습니다.
이번에는 더듬이의 탄성력이 문제였습니다.
기존의 더듬이는 케이블 타이로 만들었었는데 힘없는 케이블타이가 무슨 밀어낼 수 있는 힘이 있을까요?......
그냥 벽에 박으면 푹하고 박기 일쑤였습니다.

그래서 더듬이를 기존 케이블 타이에서 바꿔보기로 했습니다.
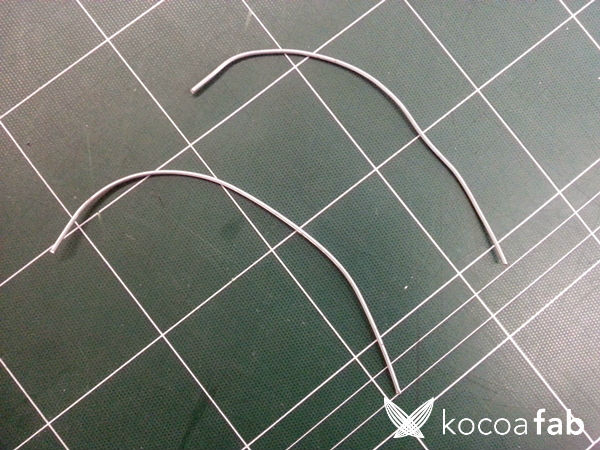
클립을 준비하고 클립을 구부려서 부드러운 곡선으로 바꿔서 더듬이 모양처럼 생기게 합니다.
클립은 단단하면서도 나름 구부렸을 때 살짝 튕기는 느낌이 있습니다.

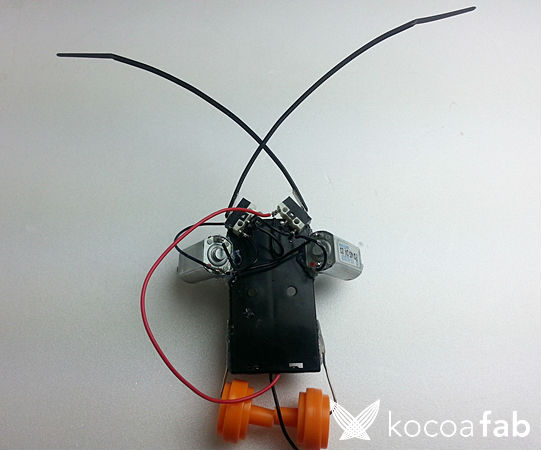
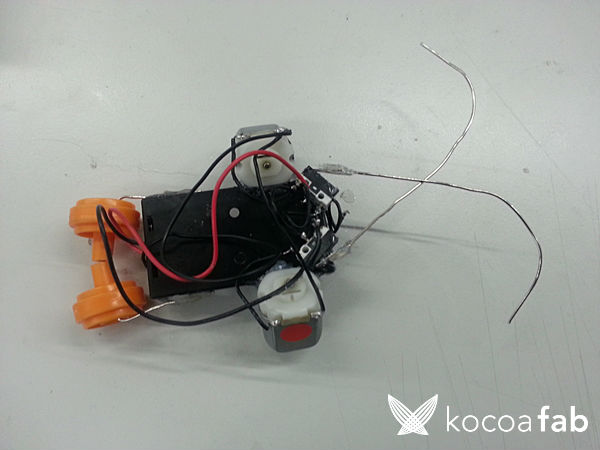
더듬이 설치 모습.
케이블타이에 비해서는 밋밋하고 멋은 없지만 클립의 탄력성은 아주 아주 맘에 들었습니다!
굵은 철사의 경우에는 단단하지만 탄력성이 매우 약합니다.
그냥 손으로 휘면 휙하고 휘어지기 때문에 철사는 추천하지 않습니다. (클립, 안테나를 추천)
3. 방향 쏠림 문제
풍뎅이 로봇이 한 방향으로 쏠려서 직진 하는 문제는 그건 두 모터를 데칼코마니처럼 맞도록 찍어내는 수밖에 없을 듯 합니다...-_-
4. 등껍질 만들기
둥그런 돔모양의 플라스틱재질의 재료와 동그라미 스티커를 준비합니다.
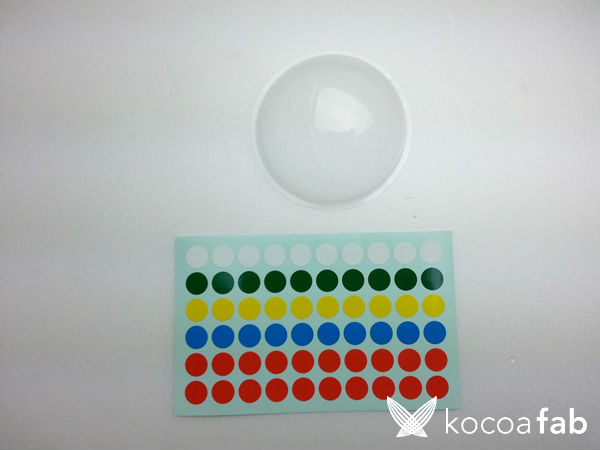
스티커를 마구마구 붙여줍니다.
끝

5. 작동해보기
영상에서는 등껍질을 빼고 작동하였습니다.
속도가 전보다 너무 빨라져서 따라서 찍기가 힘들었습니다;ㅠ





수박쨈
 풍뎅이 로봇, Beetle Bot, DC모터, SPDT스위치
풍뎅이 로봇, Beetle Bot, DC모터, SPDT스위치
