
아두이노 + 아날로그서보모터를 이용한 실로폰연주봇 입니다.
2015-04-05 10:43:15
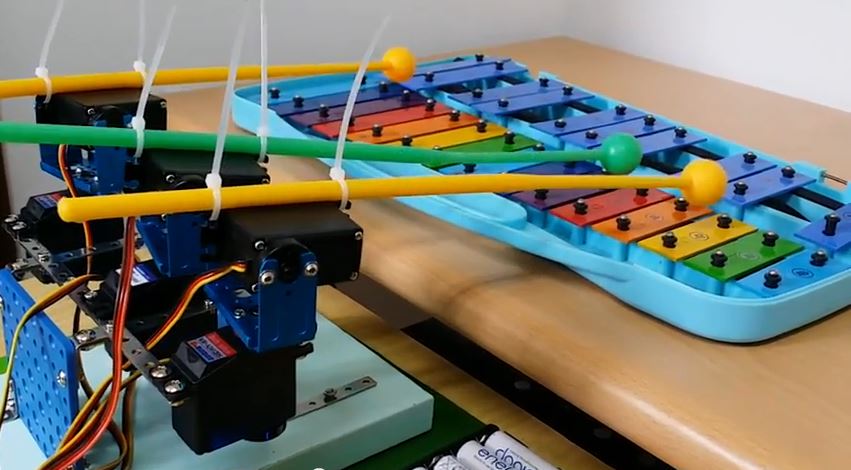
아두이노 호환보드를 이용하여 완성한 실로폰 연주로봇입니다.
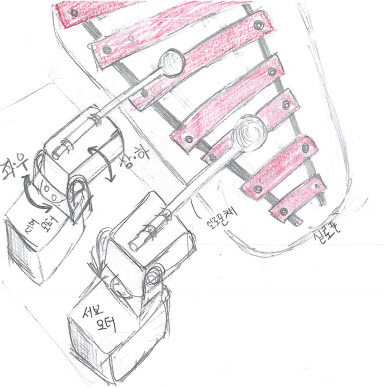
기존 실로폰 연주로봇의 경우 음판 한 개마다 서보모터가 1개씩 역할을 담당하여 다량의 모터가 필요했으나.
이 로봇은 2개의 관절 움직임으로 좌우로 이동하며 음판을 칠 수 있기 때문에 6개의 서보모터를 이용해 많은 음판의 연주가 가능합니다.
최초 제작시에는 4개의 서보모터를 이용해 2개의 팔이 움직이는 형태였으나. 2개의 서보를 축하여 3개의 팔이 움직이게 되니 훨씬 부드러운 연주가 가능했고, 빠른 박자의 연주도 가능해졌습니다. 또한 연주할 수 있는 음역도 상당히 늘게되었습니다.
음악의 계이름과 이에 따른 연주 동작을 미리 전역변수로 지정하여 활용하면 좀 더 손쉽게 음악 연주 프로그램을 구성할 수 있었습니다.
1) 실로폰 연주봇의 연주 영상입니다.
2) 젓가락 행진곡 연주 (서보모터 6개 사용)





최조영

